

Universal multi-joint all-purpose robot
A universal joint and robot technology, applied in the field of robots, can solve the problems of prolonged production and delivery cycle, large and cumbersome body, huge and cumbersome shape and structure design, and achieve the effect of light body and components, quiet working environment, and expansion of the application market.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific examples and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
[0046] Such as figure 1 with figure 2 Shown:
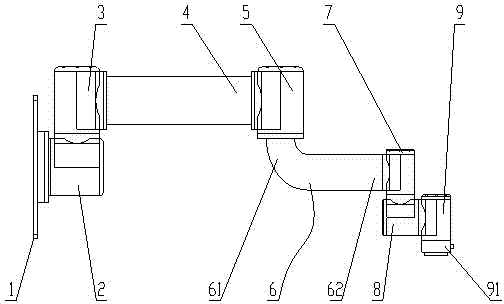
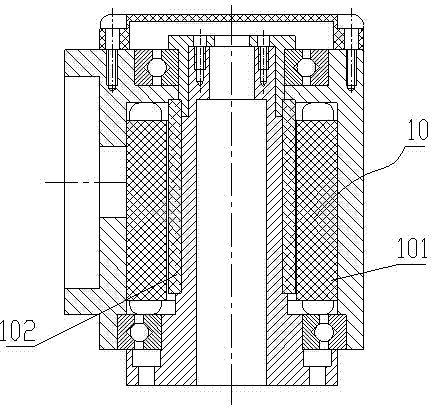
[0047] A universal multi-joint universal robot, comprising a flange 1, a universal joint 2, a universal joint 2, a straight arm 4, a universal joint 3 5, a curved arm 6, and a universal joint 4 7 connected in sequence , universal joint five 8 and universal joint six 9. The flange 1 plays a fixing role and can be installed on various parts of the ground, the machine body and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More