

Unmanned-gyroplane system used for automatic-inspection of bridges and tunnels and navigation method
A four-rotor UAV and automatic inspection technology, applied in the field of rotor UAV, can solve the problems of large depth, complex environment, and high quality requirements of operators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
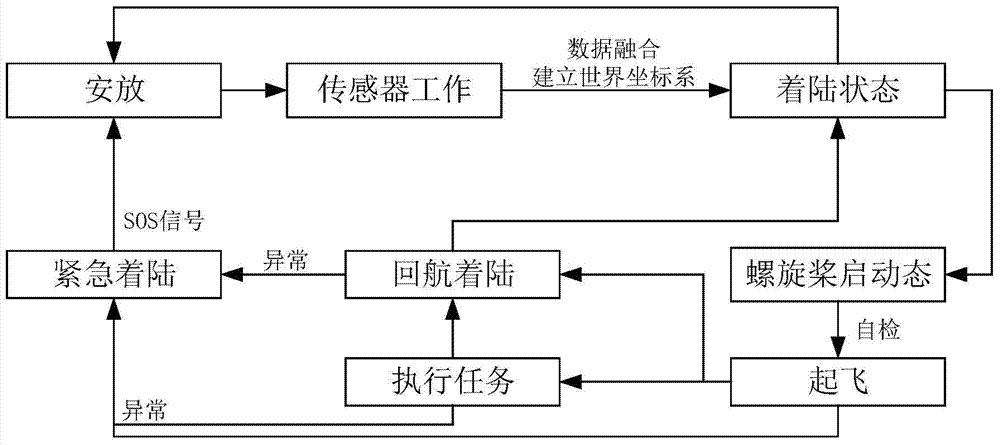
[0026] One, at first introduce the concrete structure and navigation method of the device involved in the present invention, the present invention mainly comprises:
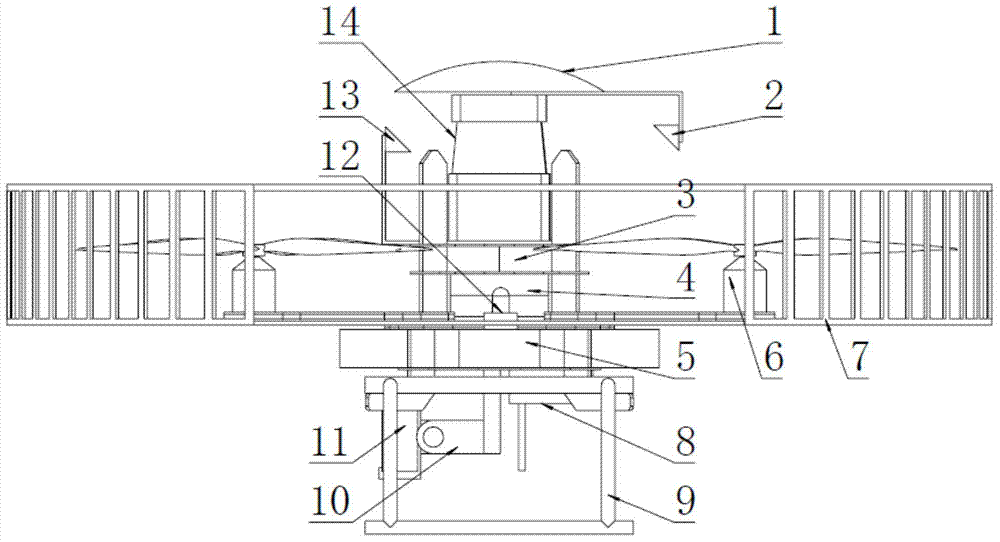
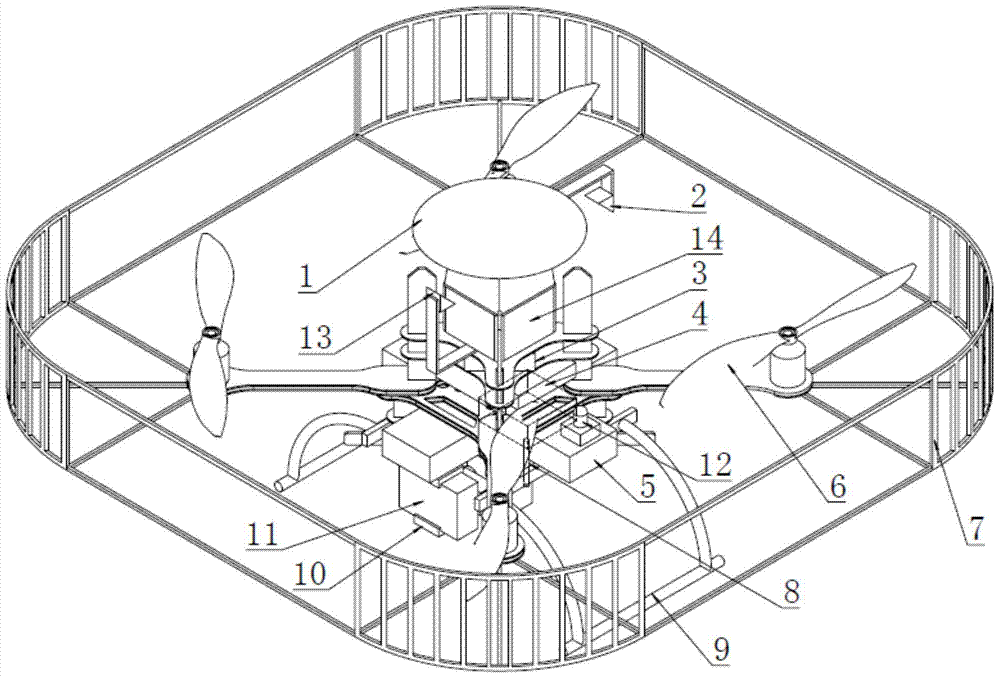
[0027] The first part, the design of the body of the automatic inspection rotor UAV:
[0028] Due to the limitations of production technology and materials, most of the current rotor drones have shortcomings such as small payload and short flight duration. Therefore, the volume and weight of various sensors must be fully considered when designing the body of the rotor drone. , power consumption and other issues, while minimizing the amount of sensors. Based on this, when the present invention designs the body of the rotor UAV, a UTM-30LX two-dimensional laser radar, a GPS module, an IMU module, a miniature high-definition camera and two right-angle reflective prisms are loaded on the body as the rotor unmanned aerial vehicle. The sensor of the machine, an RC module, a high-definition video transmission, and a co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More