

Gain self-adjustment type supercoiling slip form control method for electro-hydraulic positioning servo system
A technology of electro-hydraulic position servo and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of controller chattering, tracking error, discontinuity of sliding mode controller, etc. Conservative, the effect of improving system servo accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
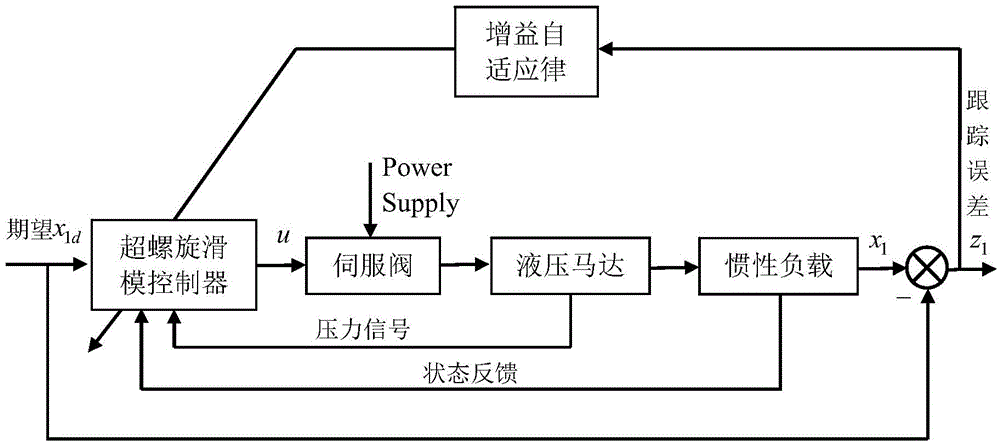
[0018] combine Figure 1~2 The gain self-adjusting superhelical sliding mode control method of the electro-hydraulic position servo system of the present invention comprises the following steps:
[0019] Step 1, establishing the mathematical model of the hydraulic electrohydraulic position servo system;
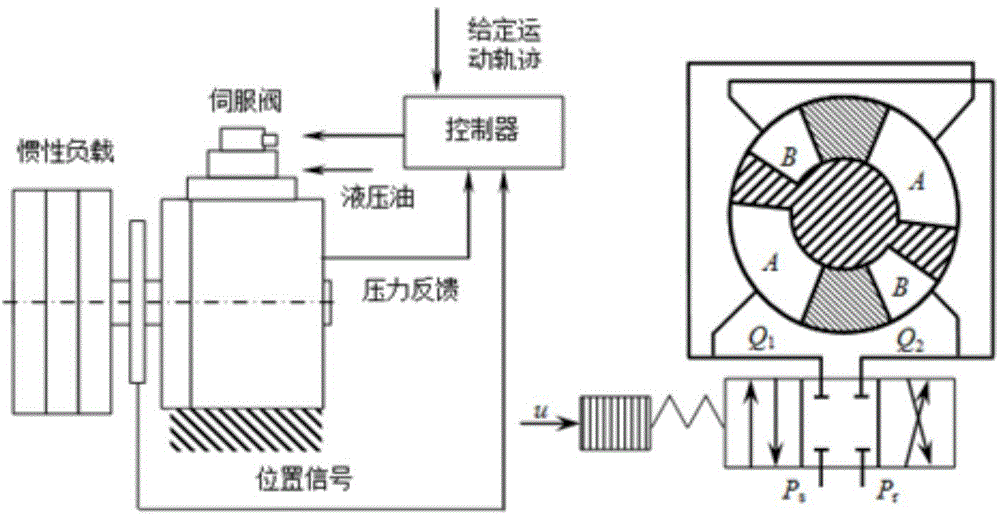
[0020] (1.1) The hydraulic electrohydraulic position servo system considered in the present invention is as follows: figure 1 Shown is an inertial load driven by a hydraulic motor controlled by a servo valve.
[0021] figure 1 On the left is the structure of the electro-hydraulic position servo system, and on the right is the schematic diagram of the structure of the hydraulic motor.
[0022] Therefore, according to Newton's second law, the equation of motion for an inertial load is:
[0023] J ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More