

Wheel type moving robot track tracking method based on fast terminal sliding mode
A mobile robot, terminal sliding mode technology, applied in two-dimensional position/channel control and other directions, can solve the problems of unknown external disturbance, instability and control system performance degradation of friction torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with accompanying drawing:
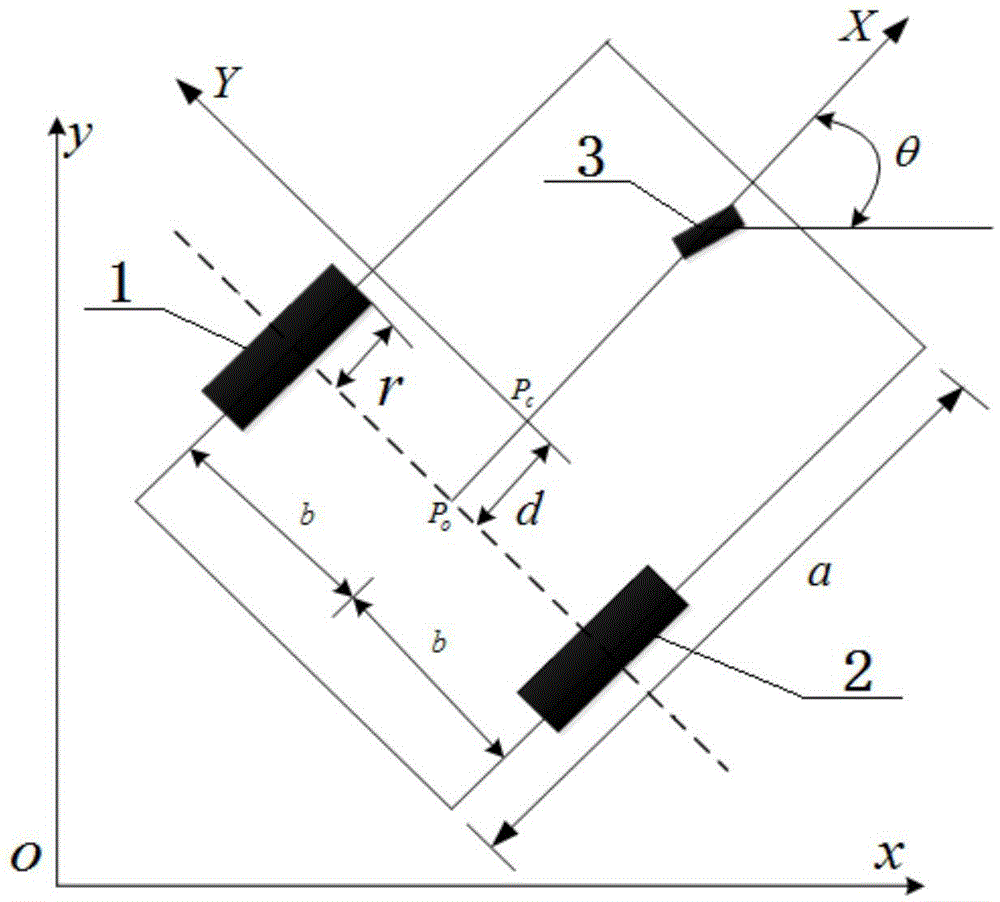
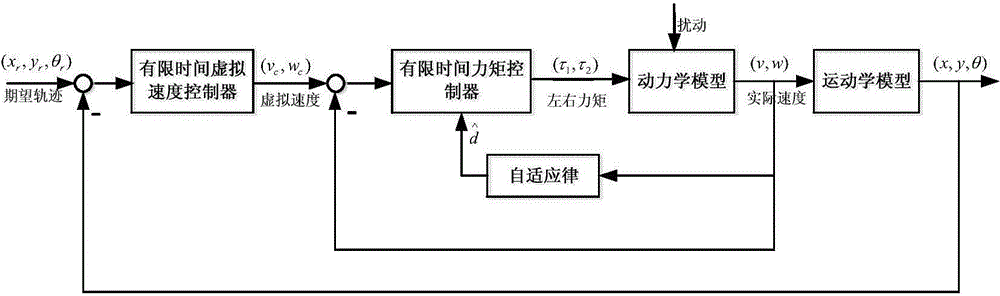
[0038] figure 1 is a schematic diagram of a wheeled mobile robot, where xoy is the world coordinate system, XY is the mobile coordinate system, p c and p o are the center of mass and geometric center of the wheeled mobile robot, b is half the length of the axles of the two driving wheels, a is the body length of the robot, r is the radius of the driving wheel, θ is the direction of motion and the world coordinates of the wheeled mobile robot The included angle in the x direction of the system, the positions of the robot’s driving left wheel 1, driving right wheel 2 and caster 3 are also as figure 1 shown. Such as figure 2 As shown, the present invention has designed a wheeled mobile robot trajectory tracking method based on the fast terminal sliding mode, including the following specific steps:
[0039]Step (1): Establish the kinematics model and the expected trajecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More