

Night preceding vehicle detection method for heavy-duty truck
A technology for heavy-duty trucks and vehicles ahead, applied in the field of vehicle safety, can solve the problems of not being able to filter out the interference of other bright areas, the influence of detection work, and the increase of difficulty, so as to achieve a simplified detection environment, high accuracy, and negative samples. Simplified effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
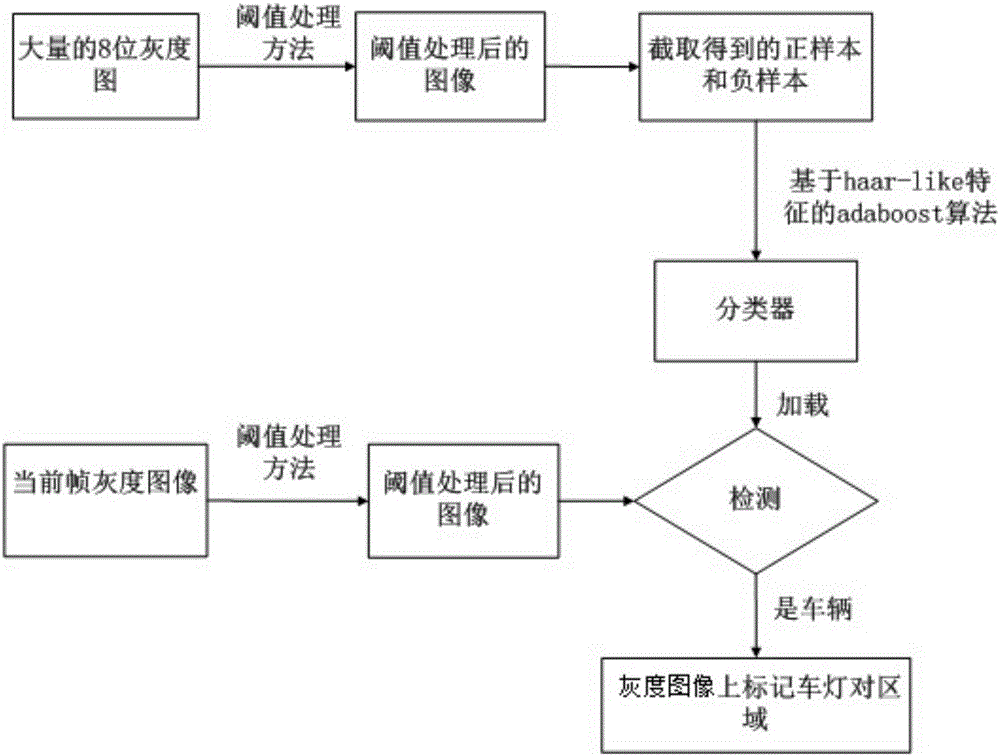
[0050] A method for detecting a vehicle ahead of a heavy truck at night, the specific steps comprising:
[0051] A. Get the classifier
[0052] (1) During the driving process of the heavy truck, the driving environment in front of the heavy truck is photographed, and a large number of 8-bit grayscale images are obtained; figure 2 It is a schematic diagram of an image in the large number of 8-bit grayscale images;
[0053] (2) adopt the threshold value processing method to remove the interference in each frame of gray-scale image in a large amount of 8-bit gray-scale images that step (1) obtains; Remove figure 2 The schematic diagram of the image obtained after the interference in image 3 shown;
[0054] (3) In the grayscale image that step (2) obtains, intercept the positive sample of the headlight pair region as the training classifier, and intercept the non-car light pair region as the negative sample of the training classifier;
[0055] (4) using the positive sample ...
Embodiment 2
[0059] According to the method for detecting vehicles ahead of heavy trucks at night in Embodiment 1, the difference is that the threshold processing method specifically includes:
[0060] a. Calculate the grayscale image in the region of interest (0, N cols / m,N rows ,N cols ·(m-1) / m) pixel value mean μ l , the region of interest refers to: the position of the first pixel in the upper left corner is (0,N cols / m), the width is N rows , high as N cols ·(m-1) / m; the value of m is 3, and the value range of m makes the region of interest not include the sky part. mu l The calculation formula of is shown in formula (I):
[0061] μ l = m ( m - 1 ) · ( N c o l s ...
Embodiment 3
[0069] According to the method for detecting vehicles ahead of heavy trucks at night in Embodiment 2, the difference is that the local standard deviation σ in the small window is calculated i , the specific calculation formula is shown in formula (II):
[0070] σ i 2 = 1 | Ω | Σ ( x , y ) ∈ Ω [ I t ( x , y ) - μ i ] 2 - - - ( I I ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More