

Autonomous lane-changing decision making system for pilotless automobile
A technology of unmanned vehicles and decision-making systems, applied in the field of decision-making systems, can solve problems such as urban traffic congestion and frequent traffic accidents, and achieve the effect of strong pertinence, good feasibility and clear functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings.
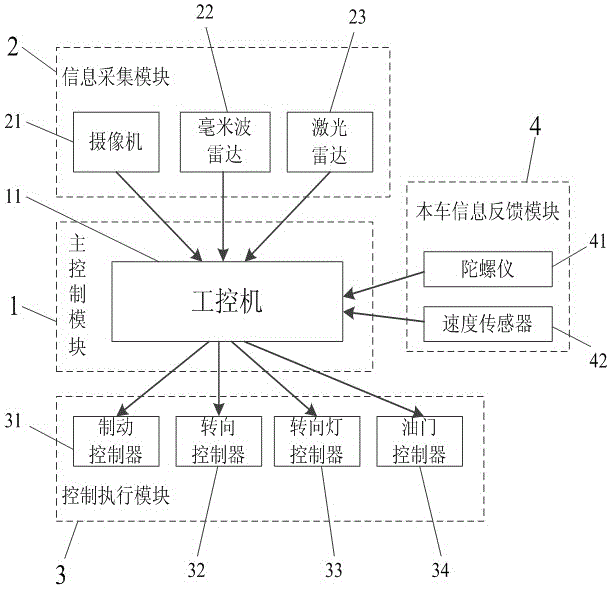
[0023] refer to figure 1 As shown, the hardware configuration of the present invention is introduced according to modules.
[0024] The main control module 1 is composed of an industrial computer 11, and its main function is to analyze and process the collected and fed back information, obtain a lane change plan, and output control commands to the control execution module.
[0025] The information collection module 2 uses a camera 21 to collect lane line information; a millimeter-wave radar 22 to collect the relative speed and distance between surrounding vehicles and the vehicle; a laser radar 23 to detect obstacles.
[0026] The control execution module 3 is composed of a brake controller 31, a steering controller 32, a turn signal controller 33 and an accelerator controller 34, and controls the brakes, the steering wheel, the turn signal and the accelerator of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More