

Automatic grabbing training and recording device for non-human primates
A primate and recording device technology, applied in animal taming devices, applications, animal husbandry, etc., can solve the problems of short time, difficult completion, and high frequency of nerve electrophysiological signals, so as to facilitate analysis and sorting, and improve data quality. The effect of high accuracy and training efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
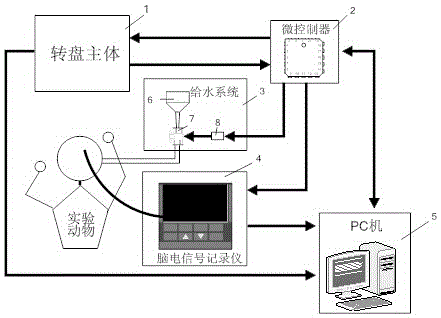
[0020] Such as figure 1 As shown, the non-human primate automatic grasping training and recording device of the present invention includes: a turntable body 1 , a microcontroller 2 , a water supply control system 3 , an EEG signal recorder 4 and a PC 5 .
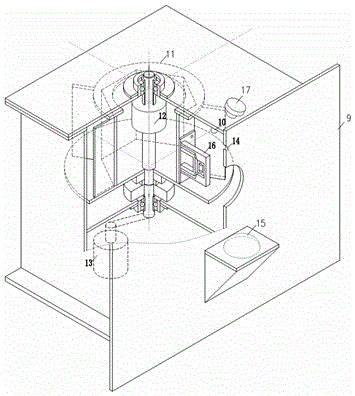
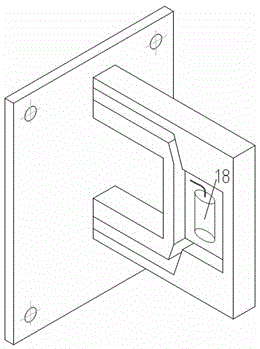
[0021] Such as figure 2 As shown, the turntable main body 1 is a closed box made of plexiglass, which is in a dark environment before the built-in lighting 10 lights up, and the loading turntable 11 is placed in it, and can be driven horizontally along the central axis by the driving motor 13. , the illuminating lamp 10 and the driving motor 13 are controlled by the microcontroller 2 . There are 6 vertical planes on the carousel 11 for holding objects 16 to be grasped. The front panel 9 of the main body 1 of the carousel has holes at the same height as the objects 16 to be grasped. The load carousel 11 is hollow inside and is equipped with a conductive slip ring 12 , a control device or a sensor device can be placed insid...
Embodiment 2
[0028] Figure 6 It is a kind of experimental flow chart of grasping paradigm, and below in conjunction with this experimental paradigm, introduces the working process of the device of the present invention: after the experiment starts, corresponding mode and parameter are set by PC 5 earlier, microcontroller 2 sends to LED indicator light 14 The red light lights up as an instruction, prompting the experimental animal to start the experiment. At this time, the illuminating light 10 is not turned on, and the experimental animal cannot see the grasping object 16 . At this time, the microcontroller 2 starts to wait for the button 15 to be pressed, and when it is detected that the button 15 is pressed, the counter starts, and when the button 15 is held for the set time, the microcontroller 2 sends a red light to the LED indicator 14 When the green light is turned off and the instruction is turned on, the experiment enters the grasping stage, and the microcontroller 2 begins to wai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More