

igbt protection circuit and protection method in stepper motor driver
A technology for stepping motors and protection circuits, applied to emergency protection circuit devices, electrical components, etc., can solve the problems of low IGBT judgment accuracy, short circuit overcurrent fault tolerance time, and short service life of IGBT, so as to reduce the number of protection times, The effect of improving life and stability and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
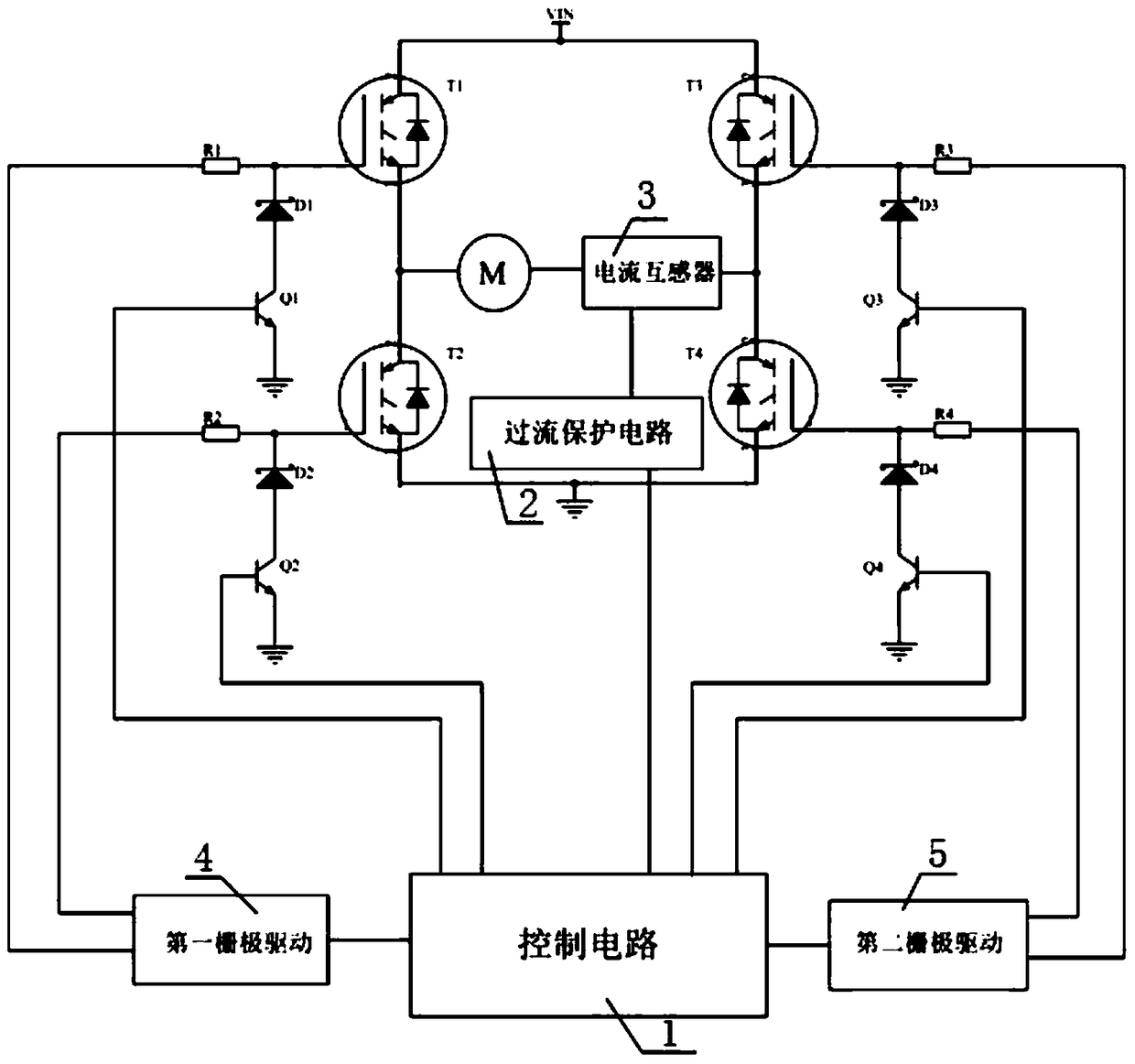
[0020] Specific implementation scheme 1, this scheme is specifically designed to protect the first type of overcurrent. Such as Figure 1 As shown, this scheme mainly includes control circuit 1, overcurrent protection circuit 2, current transformer 3, first gate driver 4, second gate driver 5, IGBTT1~T4, gate resistors R1~R4, gate stabilizer Diodes D1-D4 and transistors Q1-Q4. The control circuit 1 is connected to the first gate drive, the second gate drive and the bases of the transistors Q1~Q4, and the first gate drive and the second gate drive are connected to the IGBTs T1~T4 through the gate resistors R1~R4 The grid is connected, the collectors of the transistors Q1~Q4 are connected to the cathodes of the Zener diodes D1~D4, the anodes of the Zener diodes D1~D4 are connected to the gates of the IGBT T1~T4, and the IGBT T1~T4 and the stepping motor coil form an H-shaped PWM power In the conversion circuit, the current transformer 3 is connected in series in the motor coil...
specific Embodiment approach 2
[0031] Specific embodiment 2. This embodiment is a specific example of protecting the second type of overcurrent: when the stepper motor is working, because the coil is an inductive element, it will store a certain amount of feedback energy. When the stepper motor brakes or When reversing, the feedback energy can be calculated as follows:
[0032]
[0033] where J Ges is the total inertia of the stepping motor, n N is the motor speed, K T is the motor torque coefficient, K E Is the back electromotive force coefficient of the motor, I is the braking current, R a is the internal resistance of the stepping motor coil, when the stepping motor rotates, R a Can be expressed as:
[0034] R a =ωL+r=9.549n N L+r (2)
[0035] Where ω is the angular velocity of the stepping motor, ω=9.549n N , L is the inductance of the stepping motor coil, r is the static internal resistance of the motor coil;
[0036]Let the highest voltage of the power supply be U s·max ,but:
[0037] u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More