

Stable adaptive robust position control method for permanent magnet synchronous linear motor
A permanent magnet synchronous linear, adaptive and robust technology, applied in motor generator control, electronically commutated motor control, control system, etc., can solve the problems of weakening, severe oscillation of parameter estimation, and switching back and forth.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
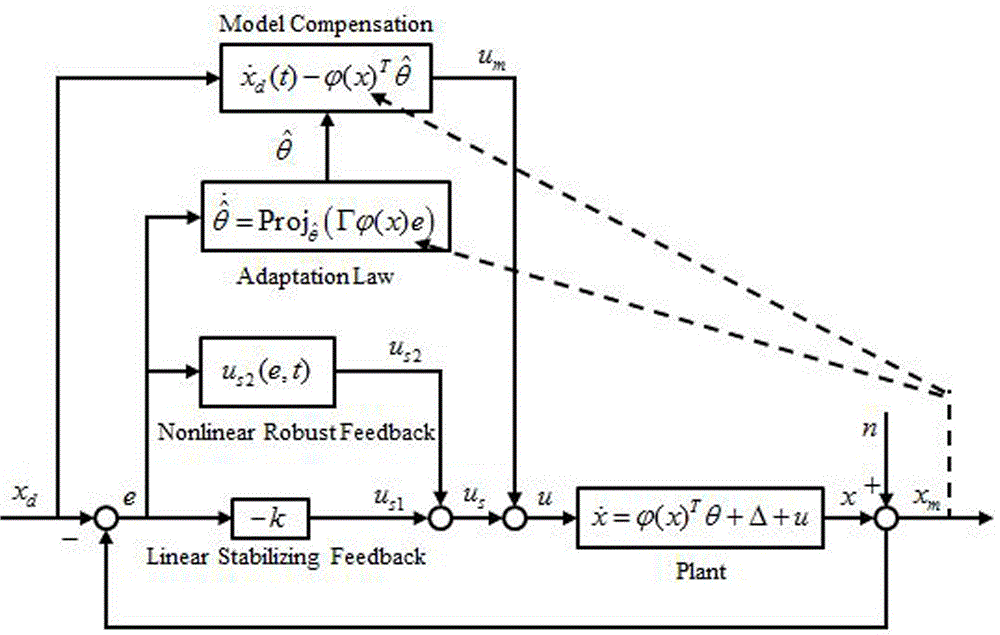
[0084] In the embodiment of the present invention, such as figure 1 , for the stable adaptive robust controller described in the present invention, the actual displacement x of the mover and the displacement command x d The tracking error e between is the input signal, the tracking error is recorded as e, and the output control law u is used as the command control signal. The control target is known in the range of parameter uncertainty and uncertain nonlinear quantity, and a control law u is designed to make the tracking error e as small as possible. The specific steps are as follows:
[0085] For a nonlinear system
[0086]
[0087] Based on the idea of stable adaptive robust control design, the control law is selected as:
[0088] u=u m + u s , u s = u s1 + u s2 ,u s1 =-k s1 e(23)
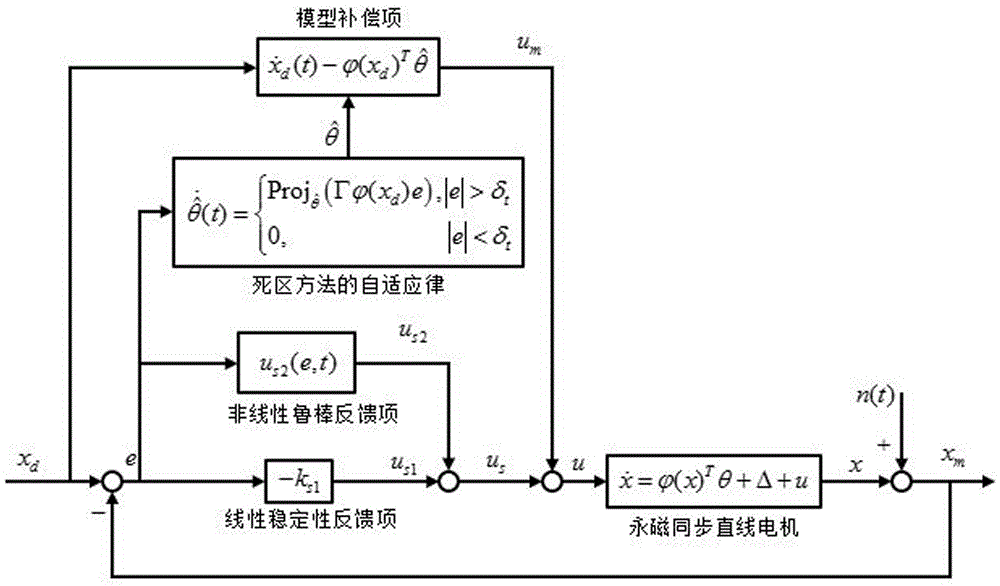
[0089] Choose the adaptive law as:
[0090]
[0091] take u s2 =-S(hsgn(e)), where the function h(x,t) can be taken as
[0092]
[0093] Robust feedback u s2 To meet t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More