

A four-degree-of-freedom piezoelectric microgripper
A technology of micro-clamps and degrees of freedom, which is applied in the direction of chucks, circuits, relays, etc., can solve the problems of micro-assembly and micro-operating system complexity, design difficulty, cost increase, etc., to reduce design difficulty and complexity , reduce the quality and volume, reduce the cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
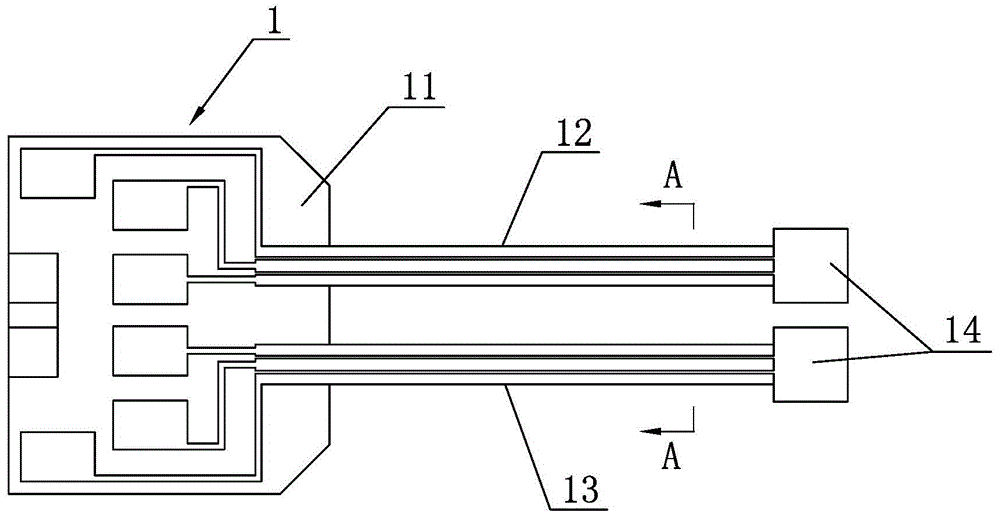
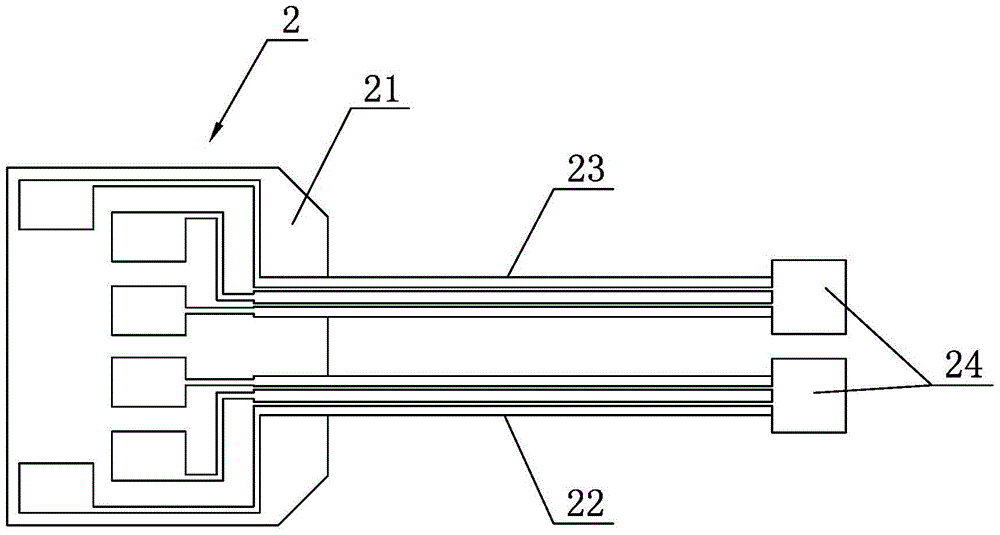
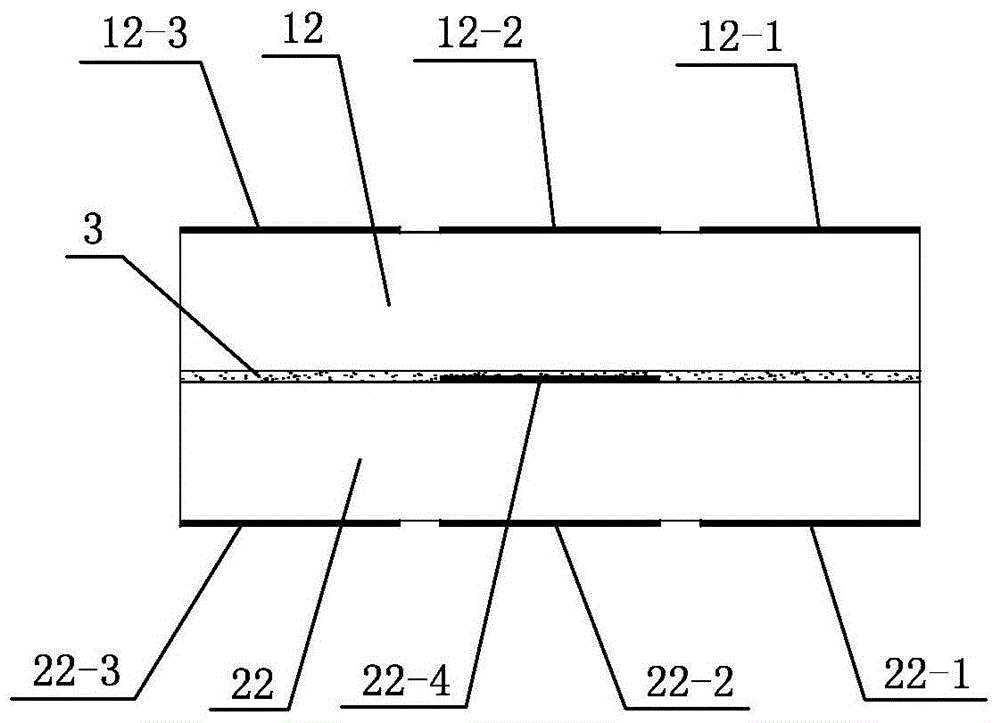
[0020] Example 1: As shown in the figure, a four-degree-of-freedom piezoelectric micro-clamp includes an upper piezoelectric ceramic wafer 1 and a lower piezoelectric ceramic wafer 2. The bonding surface of the upper piezoelectric ceramic wafer 1 and the lower piezoelectric ceramic The bonding surfaces of the wafer 2 are bonded and fixed by insulating glue 3. The upper piezoelectric ceramic wafer 1 includes an upper support portion 11 and an upper left jaw portion 12 and a right upper jaw portion 13 integrally connected to the upper support portion 11. The upper left jaw The finger 12 and the right upper finger 13 are symmetrical along the center line of the upper support 11, and the free end of the left upper finger 12 and the free end of the right upper finger 13 are respectively integrally provided with upper extensions that can be used to install different clamping heads. Section 14, the lower piezoelectric ceramic chip 2 includes a lower support portion 21 and a left lower ...
Embodiment 2
[0021] Embodiment 2: A four-degree-of-freedom piezoelectric micro clamp, including an upper piezoelectric ceramic wafer 1 and a lower piezoelectric ceramic wafer 2, the bonding surface of the upper piezoelectric ceramic wafer 1 and the lower piezoelectric ceramic wafer 2 The surfaces are bonded and fixed by insulating glue 3. The upper piezoelectric ceramic chip 1 includes an upper support part 11, an upper left finger part 12 and an upper right finger part 13 integrally connected to the upper support part 11, an upper left finger part 12 and an upper right part The finger portion 13 is symmetrical along the center line of the upper support portion 11. The free end of the upper left finger portion 12 and the free end of the upper right finger portion 13 are respectively integrally provided with an upper expansion portion 14 that can be used to install different clamping heads, and press down The electroceramic chip 2 includes a lower support portion 21 and a lower left finger po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More