

Panorama three-dimensional laser sensor data calibration method and apparatus
A technology of three-dimensional laser and calibration method, which is applied in the field of environmental perception, and can solve problems such as data errors, ignoring internal parameters of three-dimensional lasers, and calibration of three-dimensional laser sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
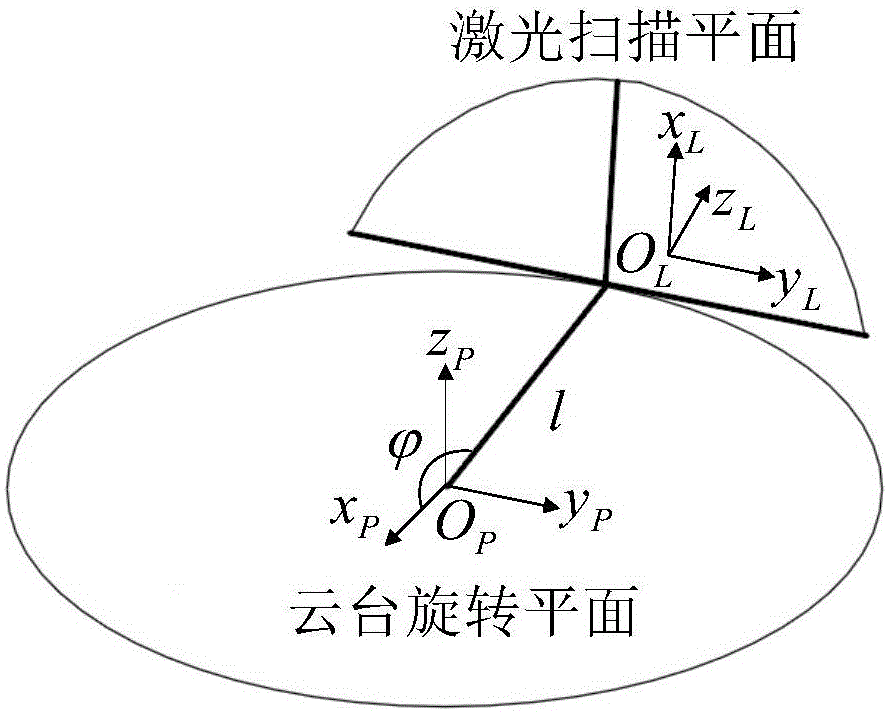
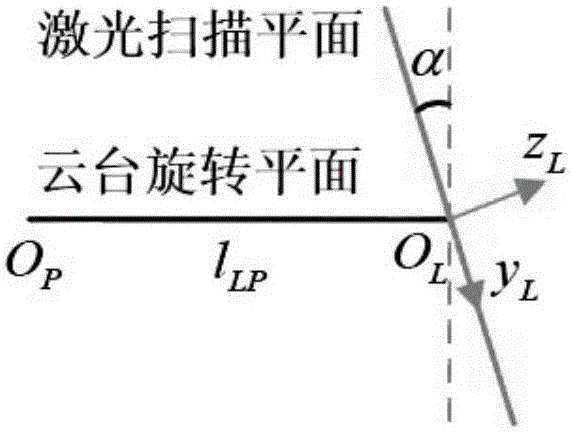
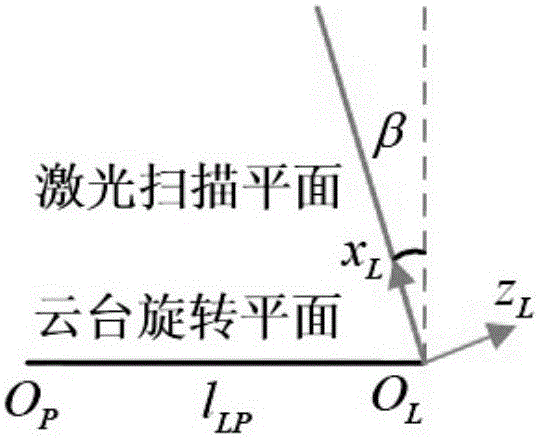
[0053] The biggest innovation of the present invention is that it fully considers the angle and position errors that may exist in the installation process, and is suitable for parameter calibration of various panoramic three-dimensional laser sensors. For this reason, the present invention uses three angle parameters between the two-dimensional laser coordinate system and the three-dimensional laser coordinate system and one deflection center distance parameter as the parameters to be calibrated, through plane fitting, laser data binarization, and corner point extraction processing, from The characteristic points belonging to the calibration device are extracted from the two parts of the three-dimensional laser data collected, and the iterative optimization method is used to solve the parameters to be calibrated, so as to obtain the angle and p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More