A control method for a wearable power-assisted exoskeleton upper limb mechanism
A control method and exoskeleton technology, applied in the field of robotics, can solve immature problems and achieve high controllability, good followability, and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
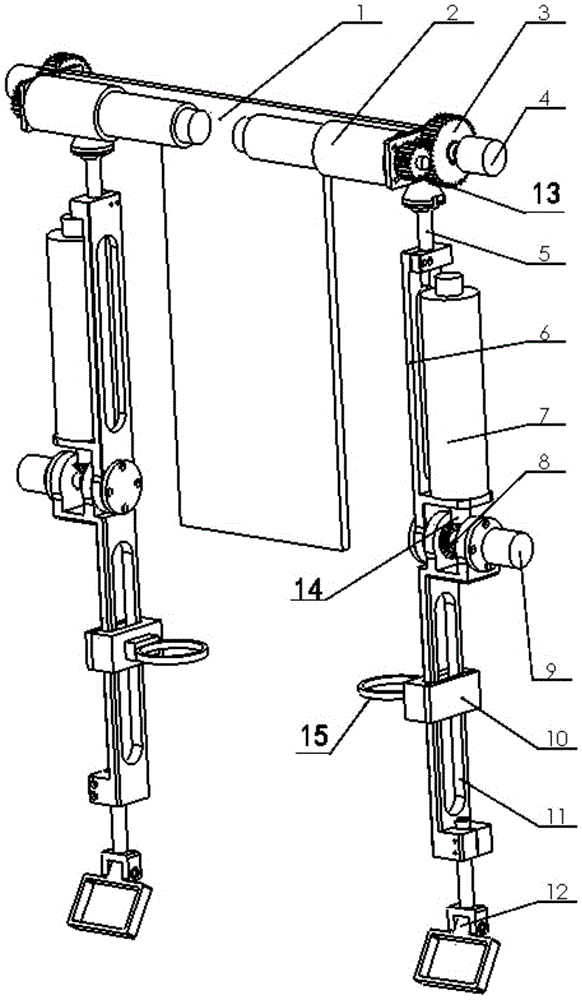
[0025] Such as Figure 1-3 As shown, a wearable power-assisted exoskeleton upper limb mechanism includes: a left arm, a right arm, a back frame 1, a real-time controller, and a motor driver; wherein, the left arm and the right arm have the same structure and are respectively hinged on the back frame 1 on both sides; the motor driver is connected with the real-time controller;
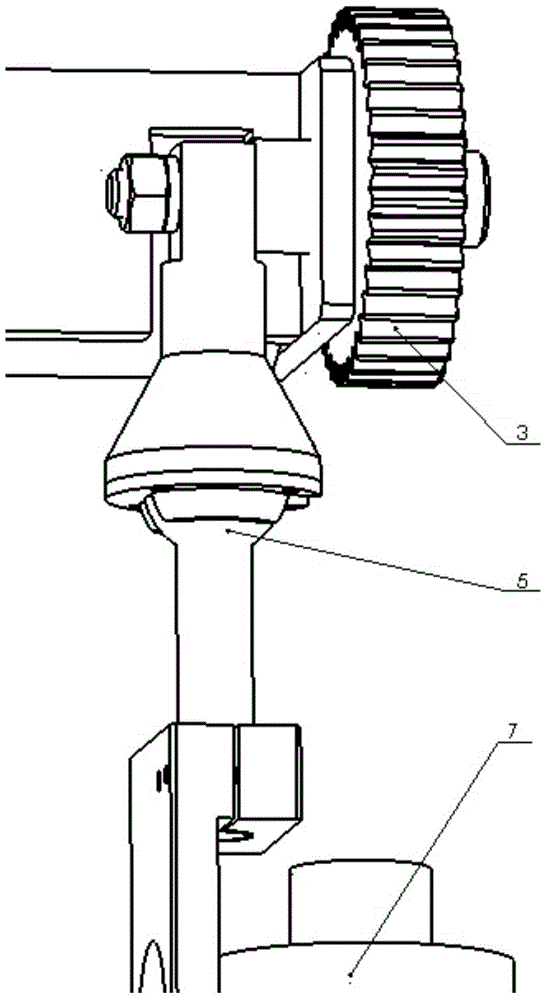
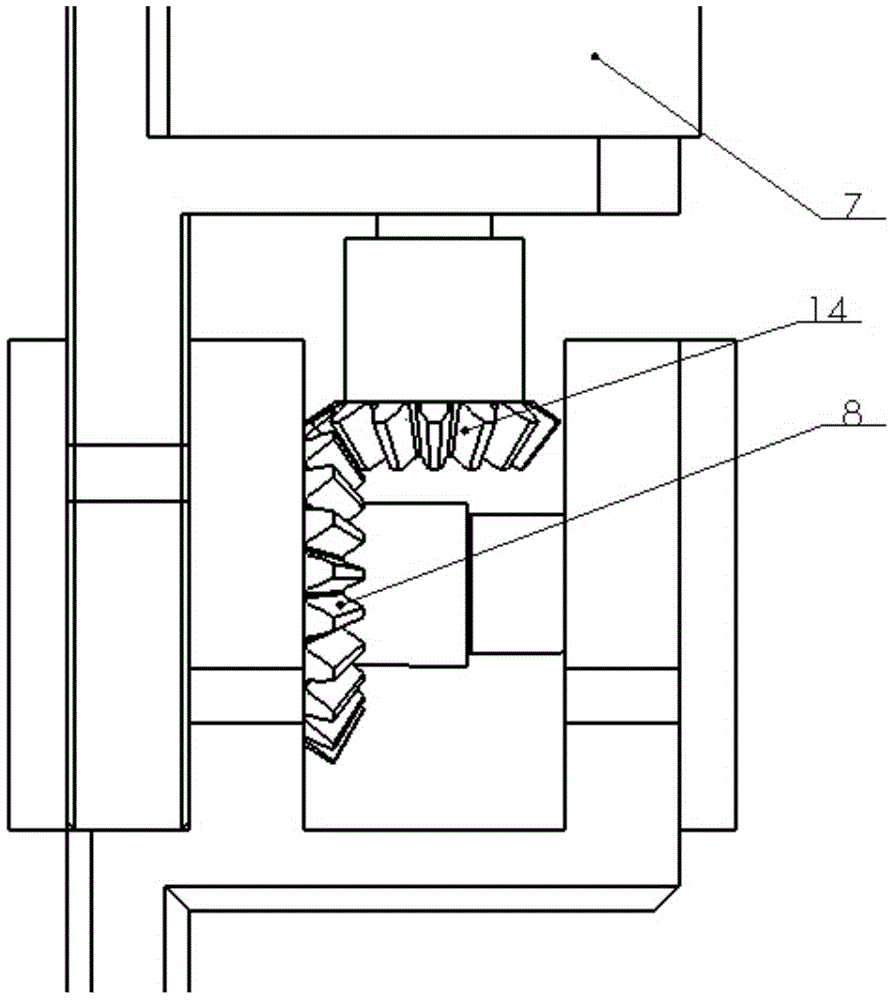
[0026] Both the left arm and the right arm include: boom motor 2, driven cylindrical gear 3, shoulder joint rotary encoder 4, ball joint 5, boom 6, forearm motor 7, driven bevel gear 8, elbow joint rotation Encoder 9, multi-dimensional force sensor 10, forearm 11, palm 12, driving cylindrical gear 13, driving bevel gear 14, forearm strap 15; wherein, the upper end side of the arm motor 2 is installed on the back frame 1; The output shaft of the motor 2 is fixedly connected with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More