Mobile robot obstacle avoidance navigation method and system
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A mobile robot and robot technology, applied in the field of automation, can solve the problems of high maintenance cost, expensive hardware cost, unsuitable for robot development, etc., and achieve the effect of saving equipment cost, ensuring accuracy and effectiveness
Inactive Publication Date: 2015-12-02
BEIJING EVOLVER ROBOTICS CO LTD
View PDF8 Cites 79 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0006] The existing robot autonomous obstacle avoidance navigation technology has the disadvantages of complex structure, expensive hardware cost, and high maintenance cost, and is not suitable for the rapidly growing robot development needs.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0075] Embodiment 1: A method for obstacle avoidance and navigation of a mobile robot.
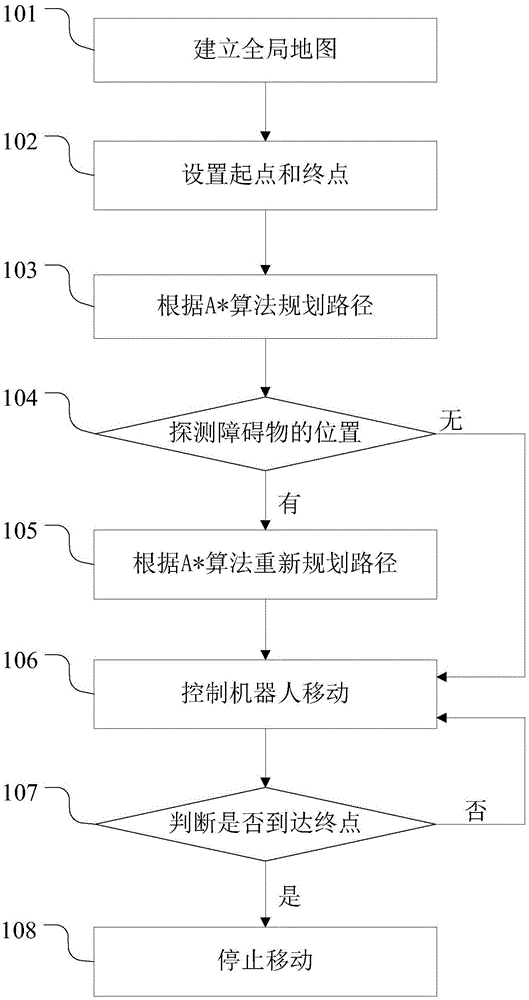
[0076] figure 1 It is a flowchart of a method for obstacle avoidance and navigation of a mobile robot in Embodiment 1 of the present invention. Such as figure 1 As shown, the process includes the following steps:
[0078] The global map is the scope of the robot's activities, and it is marked with information such as the origin of coordinates, obstacles, and the scope of activities;
[0079] The global map is a grid map, a mesh graphic composed of a series of square grids, marking the information of the indoor environment;
[0080] The grid map records the position of the grid with the abscissa (X coordinate) and the ordinate (Y coordinate), and records the probability that each grid is occupied by obstacles with the CV value.
[0081] Step 102, setting the start point and end point of the robot movement.
[0082] ...
Embodiment 2
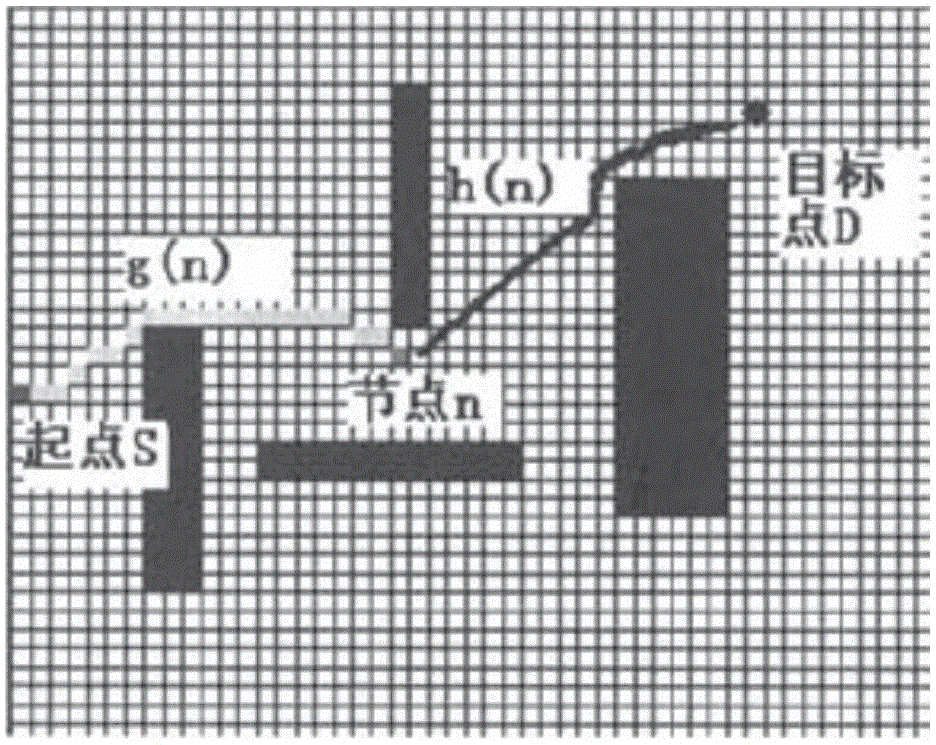
[0133] Embodiment 2: A method for planning a moving path of a robot according to the A* algorithm.
[0134] Figure 4 It is a flow chart of the method for planning the moving path of the robot according to the A* algorithm in the second embodiment of the present invention. Such as Figure 4 As shown, the method flow includes the following steps:
[0135] Step 201, put the starting point s into the open table;
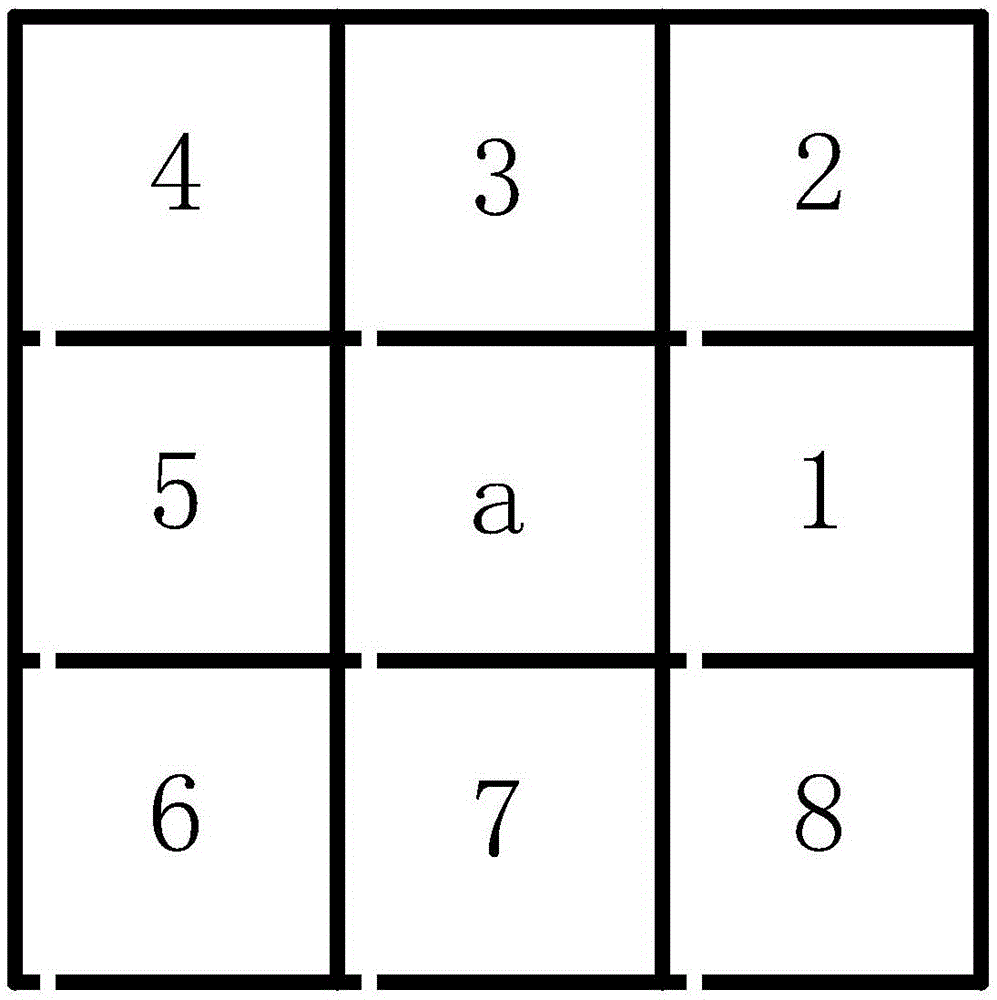
[0136] Step 202, traversing child nodes in 8 directions around node s;
[0137] Step 203, judging whether the 8 child nodes are in the open table or the close table;
[0138] If the child node is in the open table, execute step 204;
[0139] If the child node is in the close table, execute step 206;
[0140] If the child node is not in the open table or the close table, perform step 208;
[0141] Step 204, recalculate the value of node h(n)+g(n) in the open table, and judge whether to decrease;
[0142] If it decreases, then execute step 205;
[0143] If no red...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a mobile robotobstacle avoidance navigation method and system. The method includes the following steps that: a global map of a home environment is established; the starting point and destination of the movement of a robot are set; the movement path of the robot is planned according to the A* algorithm; the position of a obstacle is marked in the global map; the movement path of the robot is re-planned according to the A* algorithm; the robot is controlled to move according to the planned path; and the robot arrives at the destination and stops moving. With the mobile robotobstacle avoidance navigation method and system of the invention adopted, unknown environment can be detected, so that the information of unknown obstacles can be obtained, and the estimation function is adopted to plan the shortest and most economical path, and therefore, the equipment cost of the obstacle avoidance navigation of the robot can be decreased; the position and movement attitude of the robot can be monitored in real time, and the walking attitude of the robot can be adjusted and controlled in real time, and the accuracy and effectiveness of the obstacle avoidance navigation of the robot can be ensured.
Description
technical field [0001] The invention relates to the technical field of automation, in particular to a method and system for obstacle avoidance navigation of a mobile robot. Background technique [0002] The development of robot technology is the common crystallization of the comprehensive development of science and technology. Robots can be divided into military robots, industrial robots, service robots, etc. according to their uses. Among them, there is a huge demand for mobile robots in these types of robots. [0003] The research scope of mobile robots covers: architecture, control mechanism, information system, sensing technology, planning strategy, and drive system, involving mechanical kinematics, artificial intelligence, intelligent control, pattern recognition, image processing, and vision technology , sensor technology, computer network and communication, and bioinformatics, etc. Mobile robots are not only widely used in industry, agriculture, medical treatment, s...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More