

Six-freedom-degree bionic mechanical arm based on pneumatic muscle
A pneumatic muscle and bionic machine technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large size and low bionic degree of mechanical arms, and achieve the effect of improving snatch function, high bionic degree, and high bionic degree.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing:
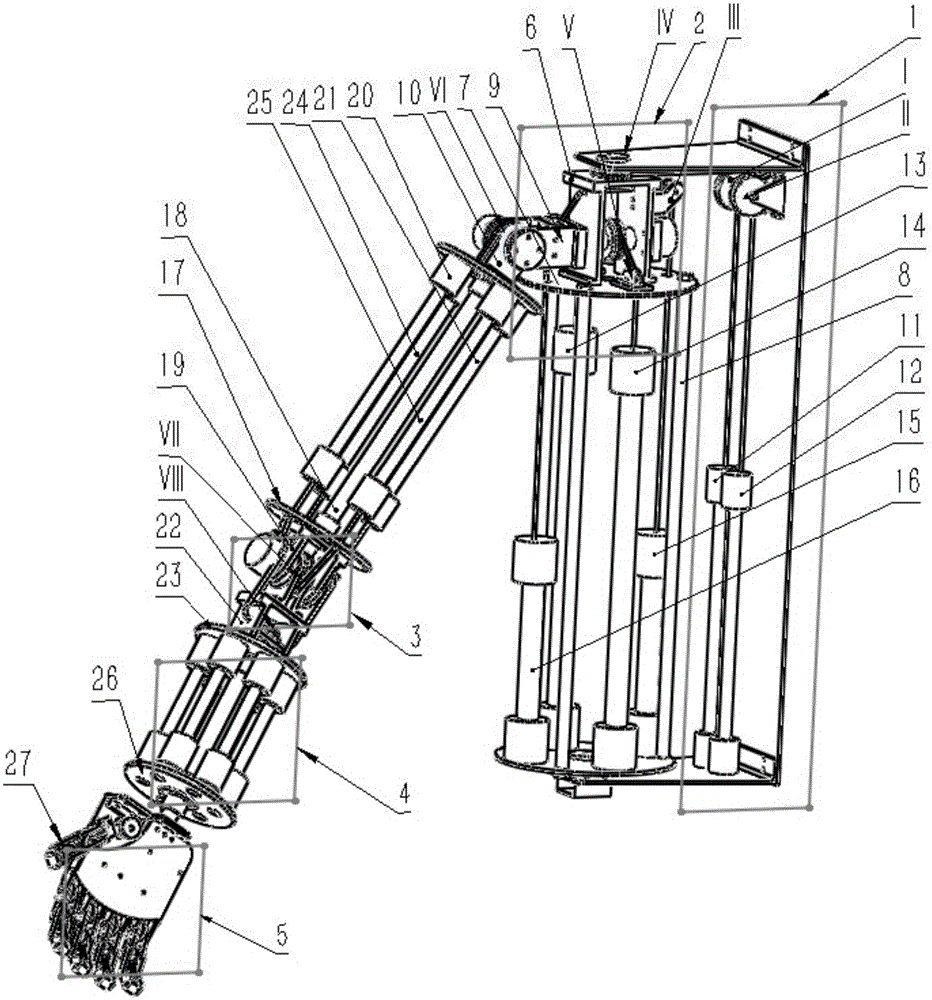
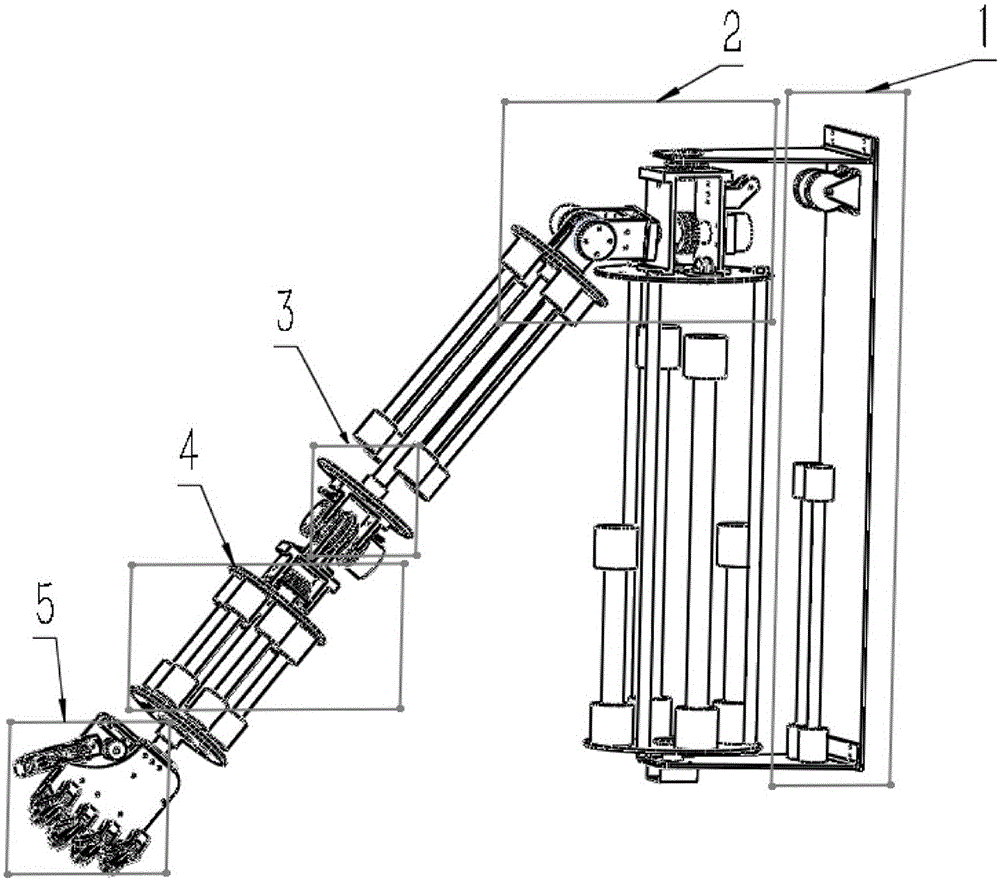
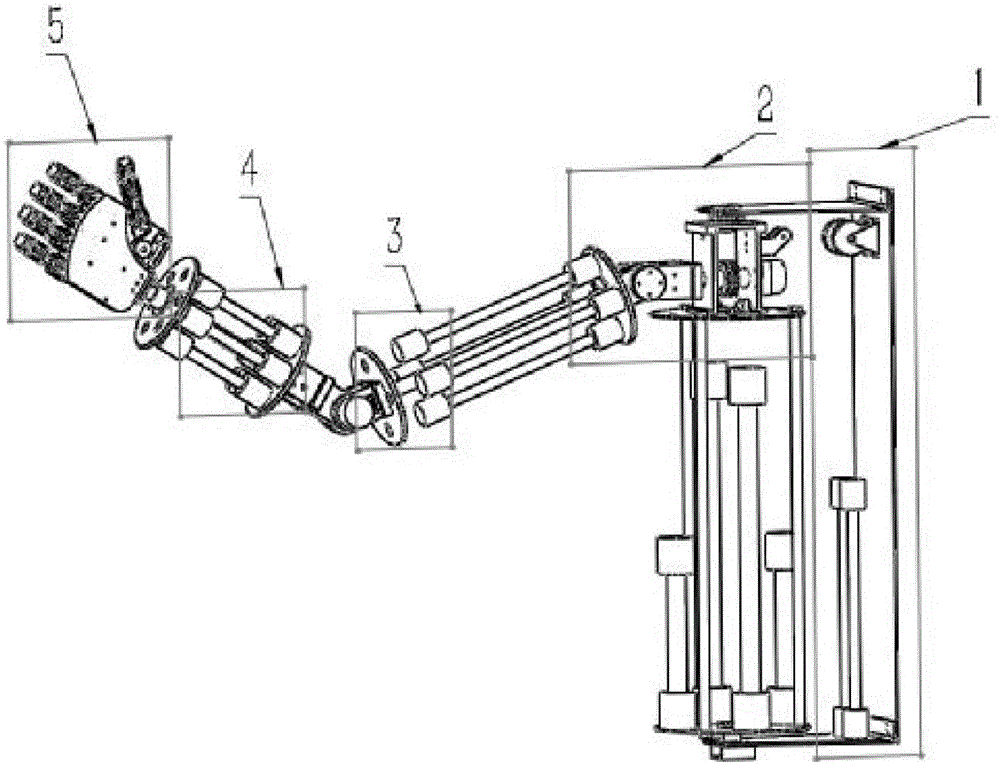
[0032] Such as figure 1 As shown, the technical scheme adopted by the present invention is as follows: a bionic mechanical arm with six degrees of freedom based on pneumatic muscles, including a frame 1, a shoulder joint 2, an elbow joint 3, a wrist joint 4 and a mechanical palm 5, wherein the shoulder joint 2 , elbow joint 3, wrist joint 4 and mechanical palm 5 are sequentially connected and fixed on the frame 1, and a pneumatic muscle is used as a driver, and the swing and rotation of the joint is realized by the pulley assembly.
[0033] The frame 1 is an L-shaped frame structure, and the frame 1 includes a bottom support plate, a top support plate and an intermediate connecting plate, wherein the above-mentioned bottom supporting plate and the top cardboard are respectively fixedly connected to the lower part and the upper side of the intermediate connecting plate, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More