Judgment method of safety boundary of hovercraft
A technology of safety boundary and determination method, applied in special data processing applications, instruments, electrical digital data processing, etc., to reduce pressure, ensure safe navigation, and reduce hovercraft instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
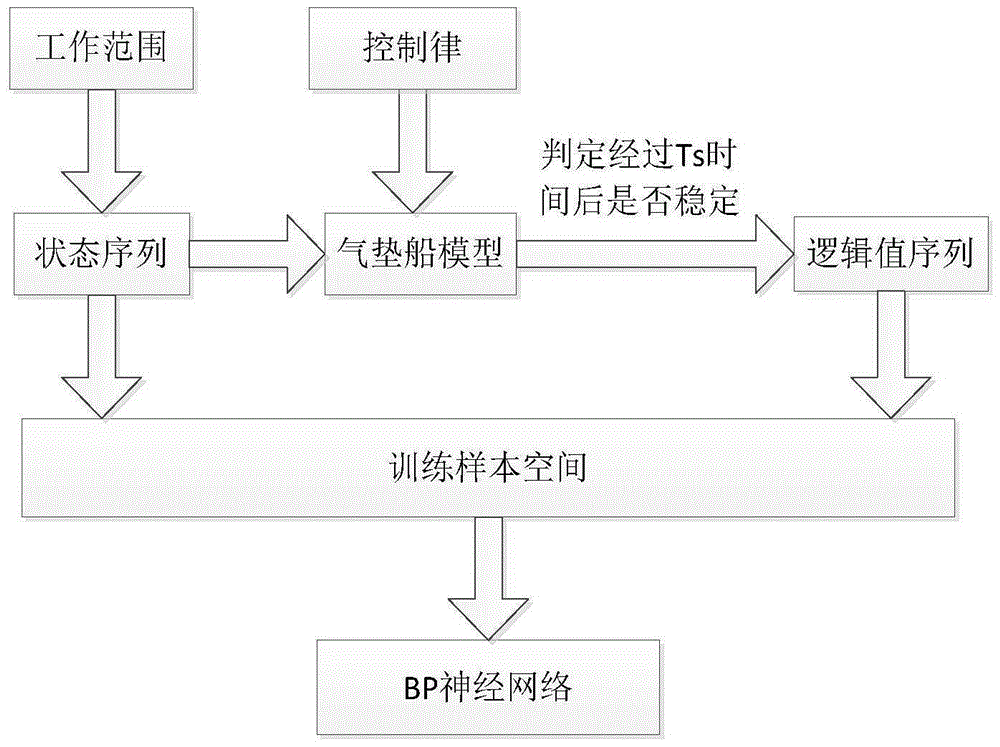
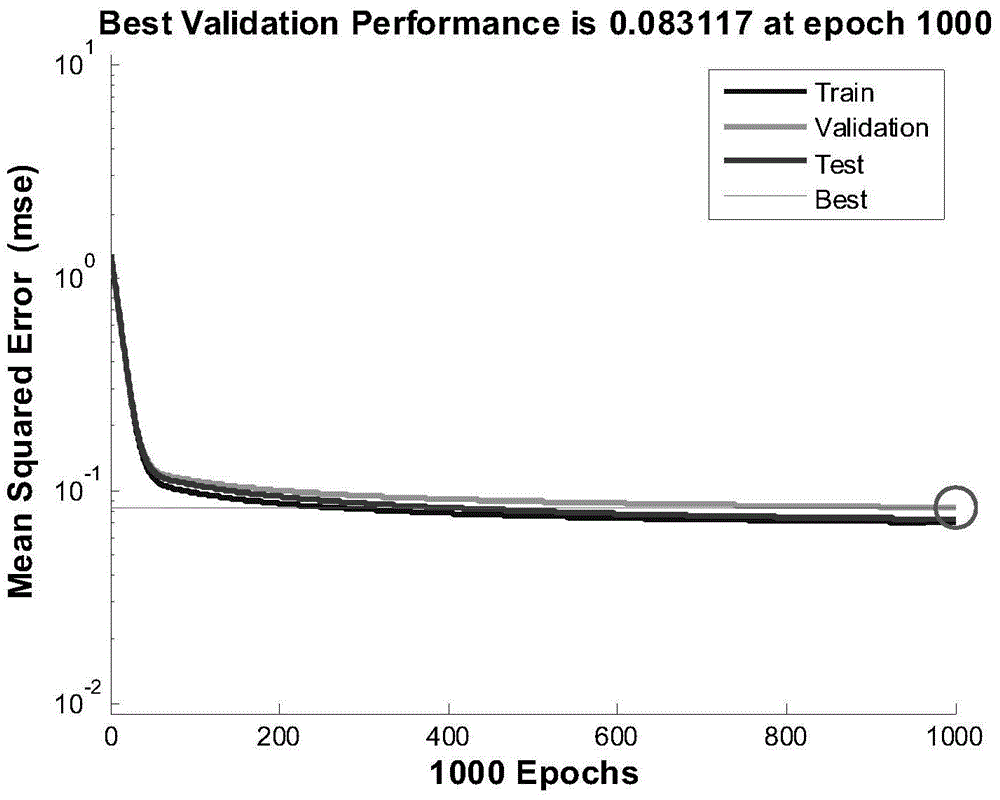
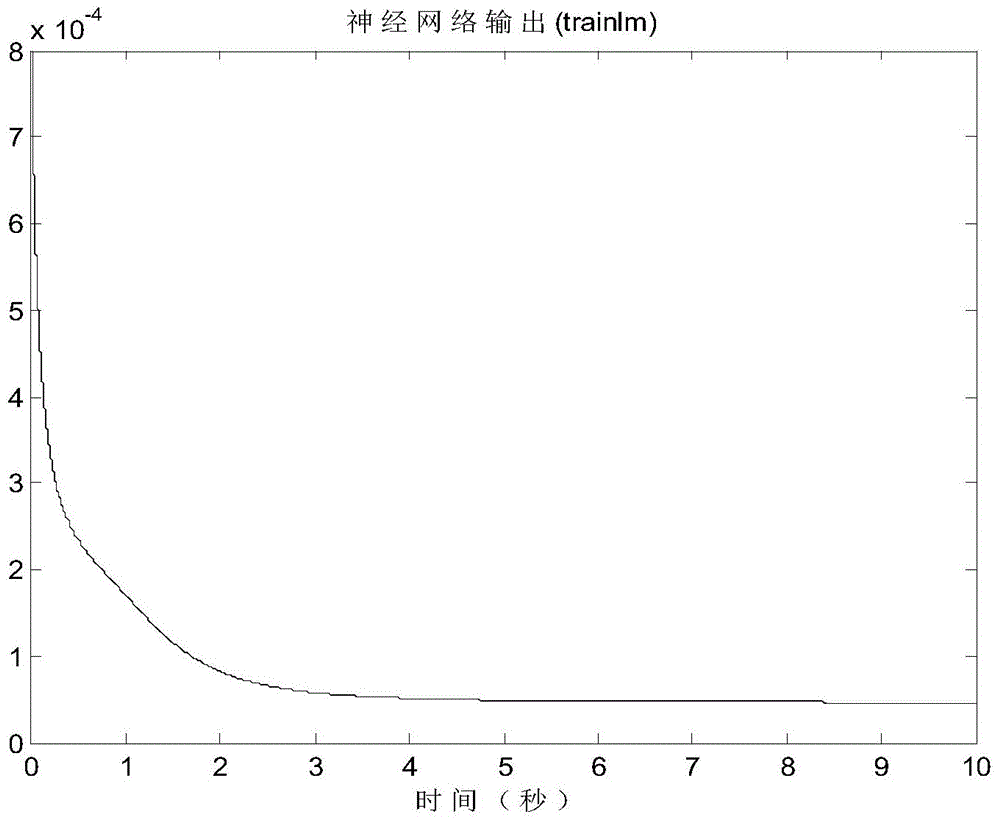
[0022] The invention mainly includes obtaining sample space, training BP neural network and adopting dichotomy method to calculate safety boundary.
[0023] combine figure 1 , the process steps to obtain the sample space are as follows:
[0024] 1. Obtain the status information of the hovercraft, and use the six parameters of sideslip angle, gyration angular velocity, heel angle, heel angular velocity, pitch angle and pitch angular velocity with the variable x 1 ,x 2 ,x 3 ,x 4 ,x 5 ,x 6 Indicates that the vector X=[x 1 ,x 2 ,x 3 ,x 4 ,x 5 ,x 6 ] T , the current control law of the hovercraft is denoted as τ, and the model of the hovercraft is denoted as Where X(0) represents the initial state, and t represents time;
[0025] 2. Select the initial state sequence according to the working range of the state. The working scope of the state is expr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More