Four-closed-loop stepping servo control method
A servo control, four closed-loop technology, applied in control systems, motor generator control, electrical components, etc., can solve problems such as lost steps, reduce reactive power loss, solve low-speed vibration problems, and reduce heat generation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
[0016] The stepping servo system provided by the embodiment of the present invention can be widely used in fields such as mechanical arms, medical instruments, numerical control machine tools, laser cutting machines, precision turntables, and the like.
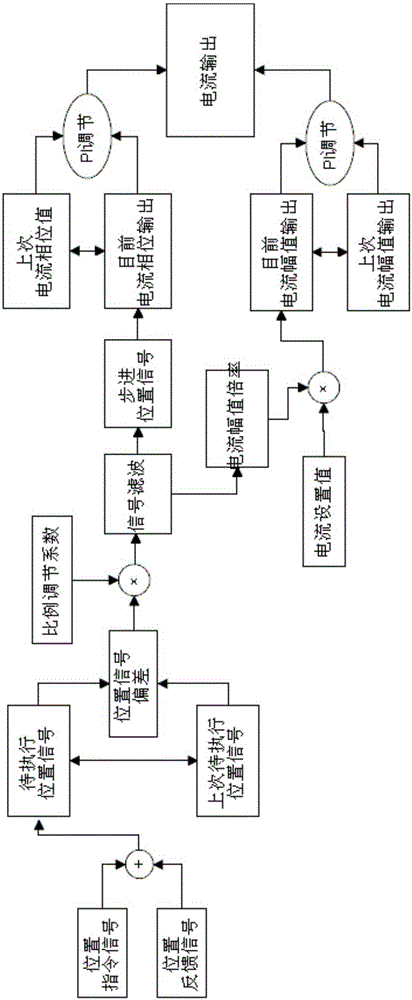
[0017] The embodiment of the present invention provides a stepping servo control method that can servo the torque, speed, and position of a stepping motor. The servo system based on the control method includes a stepping motor equipped with a position / speed feedback device and a motor coil. Current detection feedback inverter circuit, single chi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More