

Visual servo control method based on iterative duration variation
A technology of visual servoing and control methods, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of model uncertainty, lack of depth information, affecting system stability and convergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
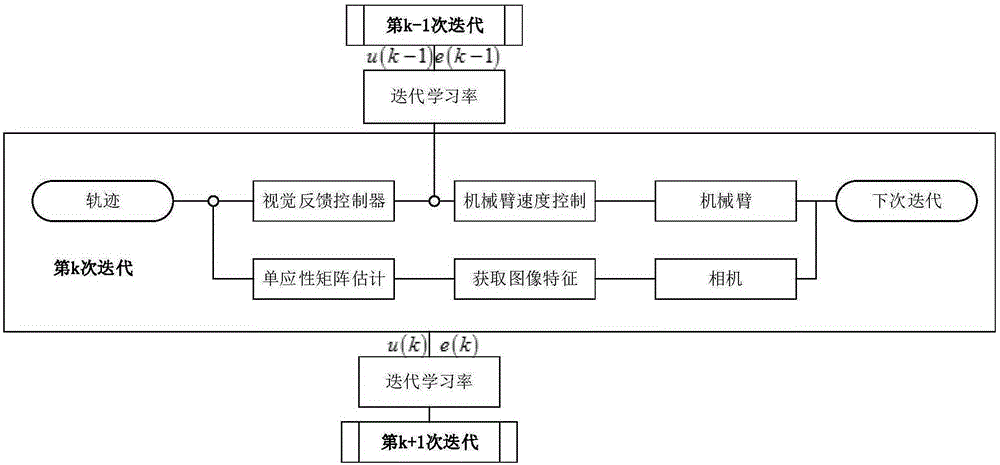
[0044] The so-called iterative time-varying control strategy means that the manipulator tracks the trajectory in the image space multiple times. Each tracking is affected by two aspects, one is the feedback error of this iteration, and the other is the input and error of the last iteration. If the target When the object runs out of view, the iteration ends.
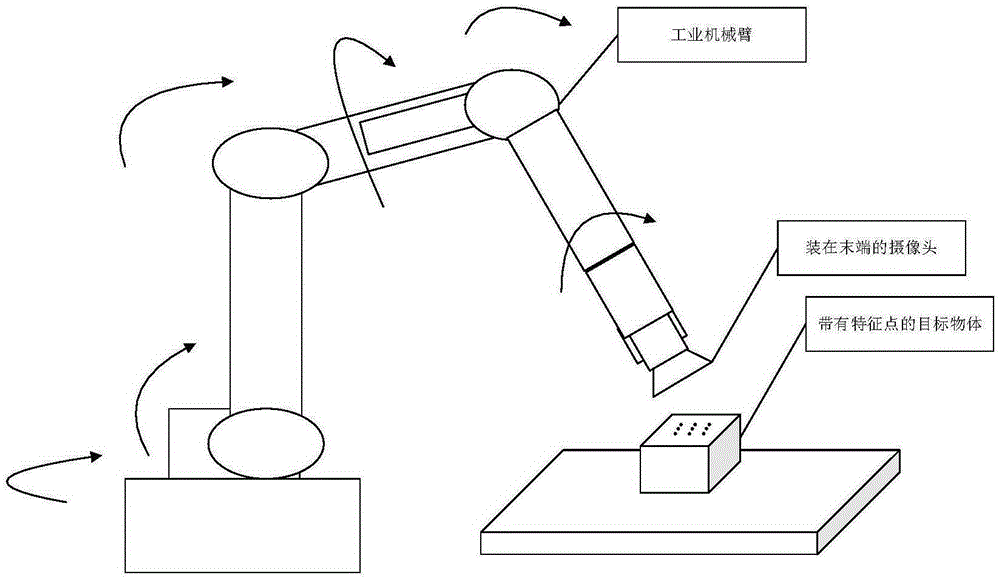
[0045] The method of the present invention is used for the scene that industrial manipulator tracks a series of target images, at first holds camera, obtains a series of reference picture sets {I j}, I j Indicates the jth picture. Extract the feature points of the reference picture, and obtain the homography matrix with the reference picture according to the pixel position of the feature points, such as Figure 5 As shown, the systematic error is obtained. The control scheme ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More