

Variable-impedance lower limb rehabilitation robot control method based on brain muscle information
A rehabilitation robot and control method technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve problems such as difficulty in motion control, lack of real-time monitoring of patient physiological information and evaluation of rehabilitation degree, lack of time-varying impedance characteristics, etc. Achieve the effects of improving naturalness and flexibility, enhancing rehabilitation confidence, and reducing work intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
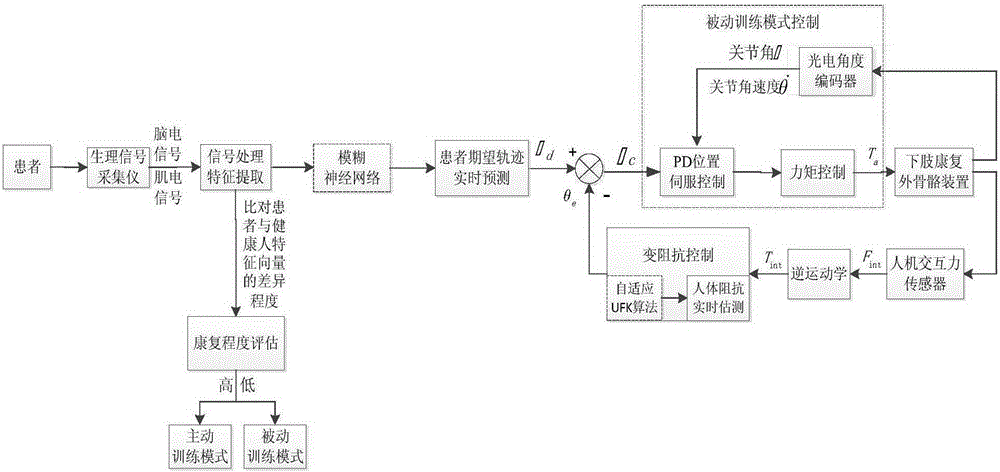
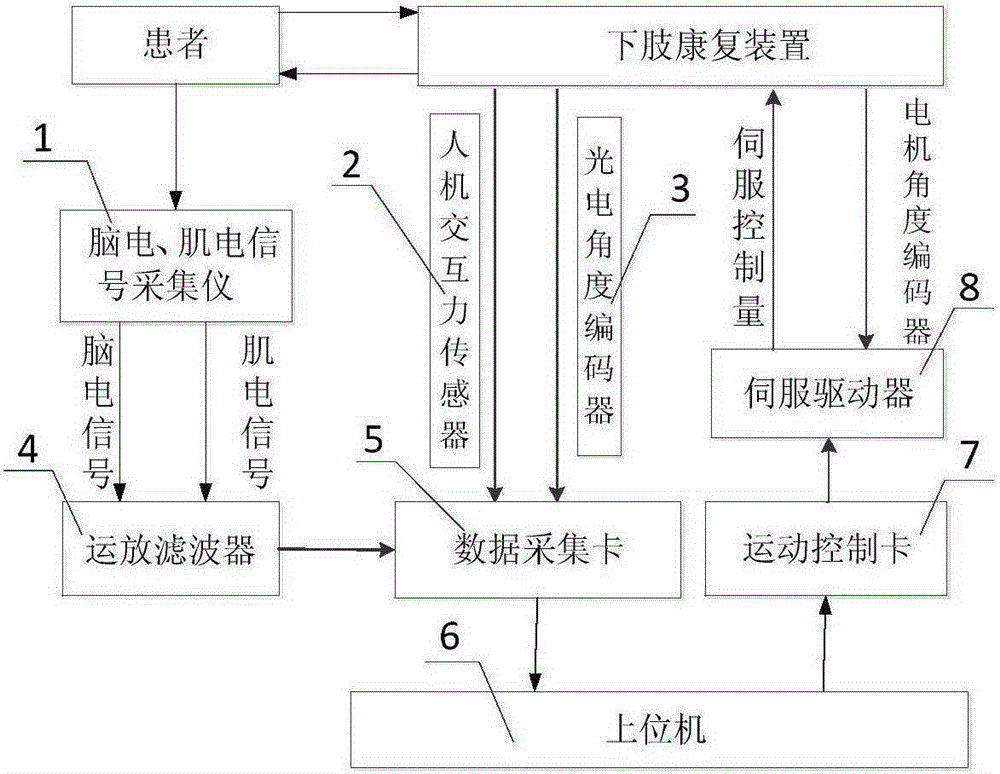
[0036] see figure 1 with image 3 , the lower limb rehabilitation robot motion control method of the present invention: monitor the patient's physiological information (surface electromyography signal, electroencephalogram signal) in real time and carry out the evaluation of patient's rehabilitation degree, accordingly, implement different rehabilitation training modes: when the degree of rehabilitation is low, adopt In the passive rehabilitation training mode, the robot is controlled to drive the patient to move with the correct physiological gait trajectory, and the patient passively follows the robot for gait rehabilitation training; when the degree of rehabilitation is high, the active rehabilitation training mode is adopted, and the patient's physiological information (surface electromyography signal, EEG signal) is monitored and analyzed in real time, and the characteristics of the EEG signal and surface EMG signal are extracted when the patient is exercising, so as to p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More