

Control method of waypoint type walking robot
A technology of a walking robot and a control method, which is applied in the electronic field, can solve problems such as poor pertinence of advertising push, consumption of system resources, and limited audience of communication, so as to improve the efficiency and effectiveness of advertising communication, reduce the occupation of system resources, and save the system resource effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
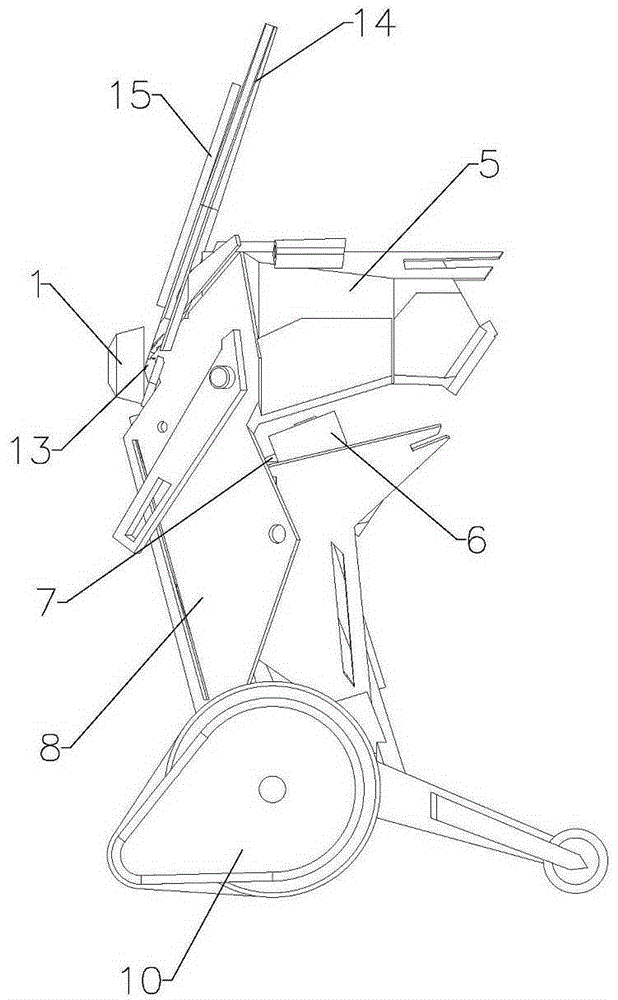
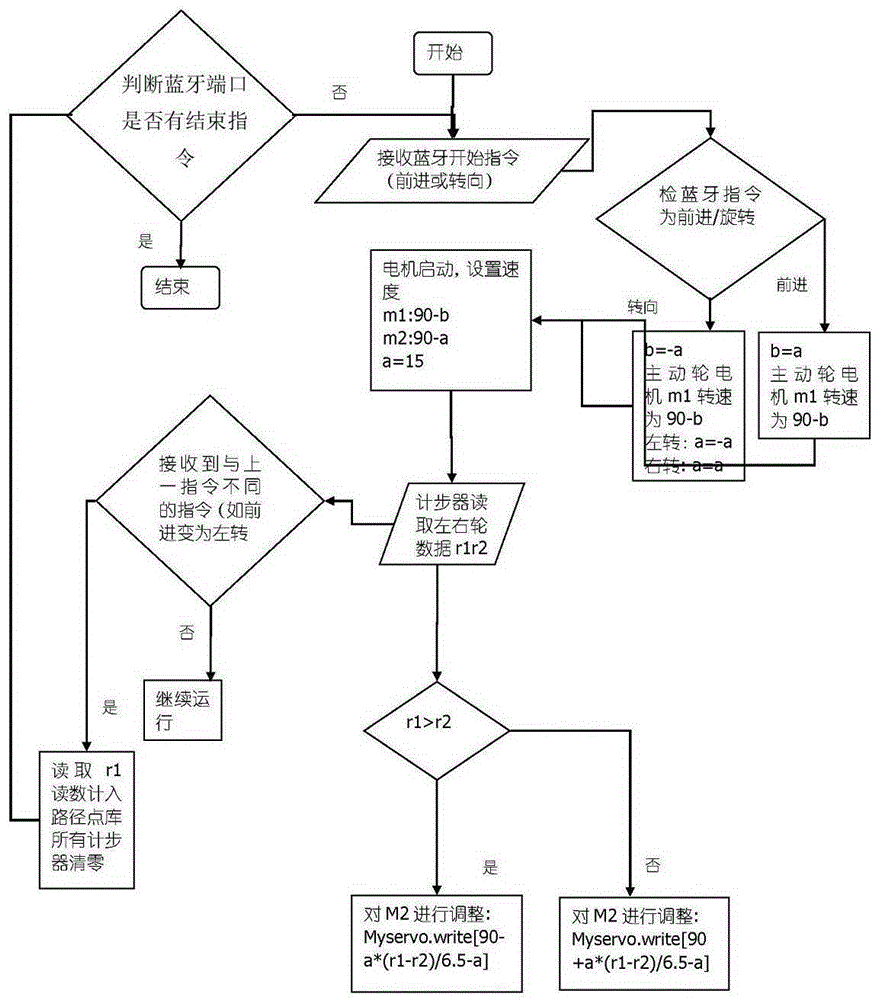
[0074] Example 1, such as figure 1 , figure 2 As shown, a control method of a waypoint walking robot, the technical solution adopted in the present invention is: a control core (arduinomega2560), a pedometer module, a walking system combining sensors and motors. The walking system establishes a unitary coordinate system through the data collected by the pedometer module (which can be realized by infrared sensors, distance sensors, and potentiometers). The system has two modes: straight forward and steering. During any mode, a pedometer module is designated as the main module r1 for data collection (r1 is installed on the motor m1). Another pedometer module r2 (r2 is installed on the motor m2) collects data and compares it with the main module r1 to correct its corresponding motor m2 to achieve precise walking effect. By recording the master data information and processing it through algorithms to obtain the path information, the motor is driven to move to the specified pos...
Embodiment 2
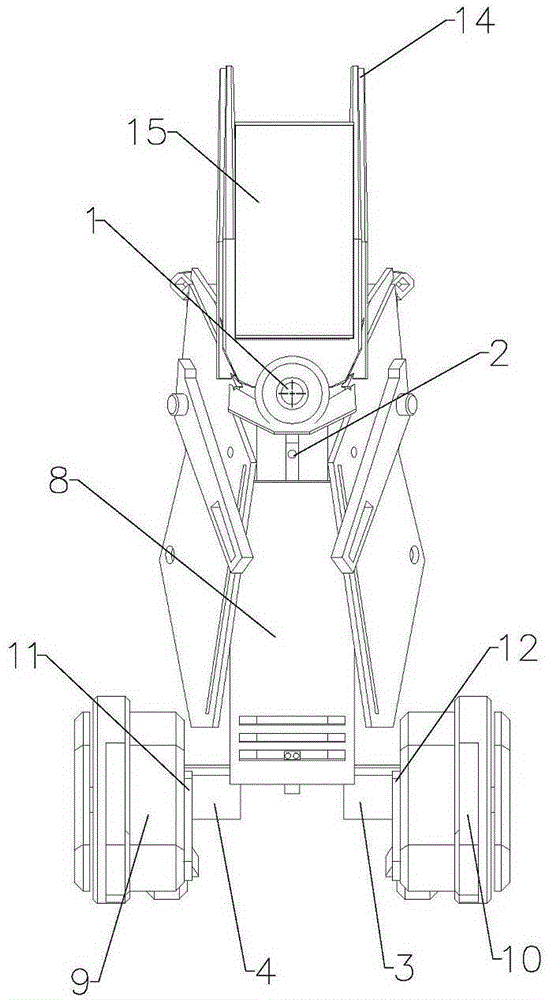
[0090] Example 2, such as figure 1 , figure 2 As shown, a control method of a waypoint type walking robot, the device implementing the method includes a frame 8, the bottom of the frame 8 is provided with a left wheel 9, a right wheel 10, the left wheel 9 is driven by a left wheel motor 4, and the left wheel motor 4 is Motor m2, left wheel motor 4 is coupled with left pedometer 11, left pedometer 11 is the main module r1; right wheel 10 is driven by right wheel motor 3, right wheel motor 3 is motor m1, right wheel motor 3 is coupled with The right pedometer 12, the right pedometer 12 is the pedometer module r2, the top of the frame 8 is provided with a leaflet box 5, and the front side of the frame 8 is provided with a miniature steering gear 13, and the miniature steering gear 13 is provided with a human body Recognition sensor 1 and ranging sensor 2, rechargeable battery 6 and controller 7 on frame 8, controller 7 is the control core, on frame 8
[0091] The top is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More