

Six-DOF (degree of freedom) carrier dynamic simulator
A degree of freedom and simulator technology, applied to simulators, simulators of space navigation conditions, instruments, etc., can solve the problem of high simulation dynamic drift and large distortion, high cost and installation and maintenance costs, and inability to ensure smooth transition of motion, etc. problem, to achieve the effect of reducing dynamic drift and distortion, enhancing motion accuracy, high system response time and acceleration, and low noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
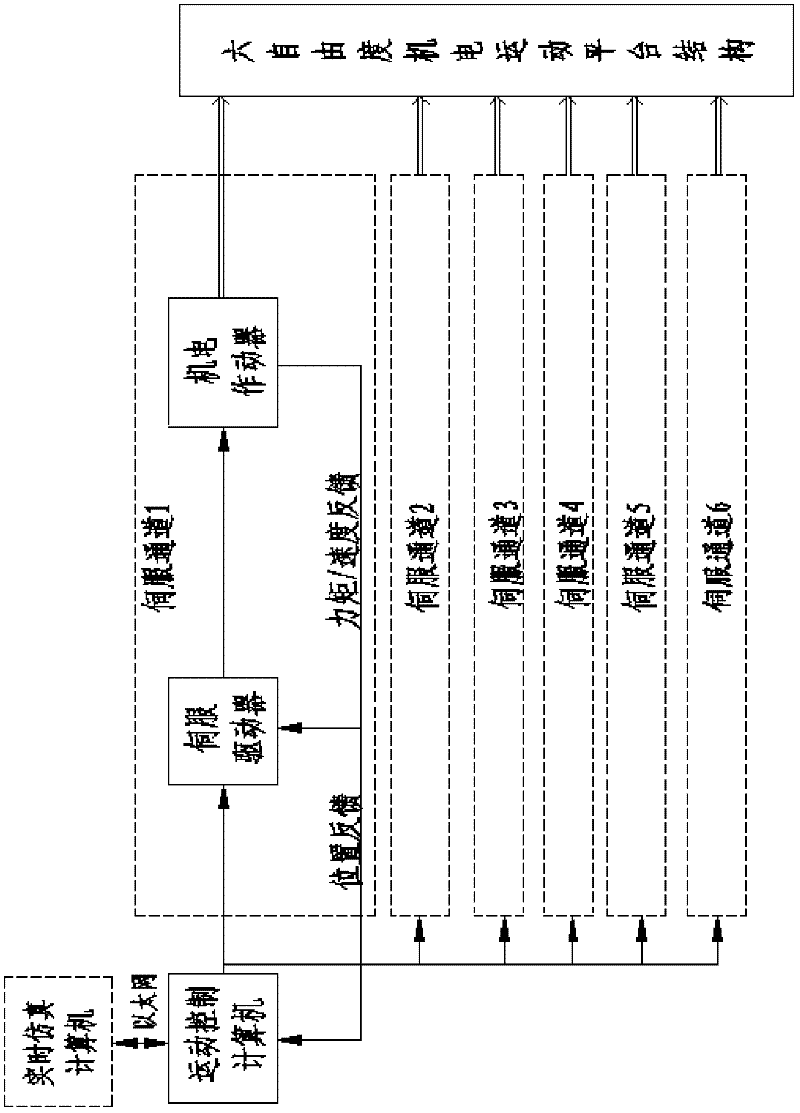
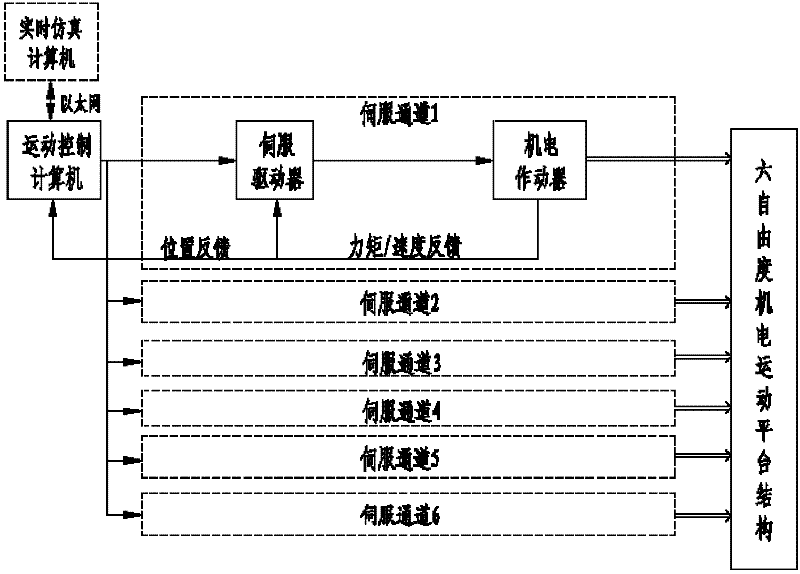
[0009] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments. like figure 1 Shown, the present invention comprises: real-time emulation computer, motion control computer, the structure and performance identical servo channel 1, servo channel 2, servo channel 3, servo channel 4, servo channel 5 that are controlled by real-time emulation computer and motion control computer 1. A six-degree-of-freedom electromechanical motion platform driven by the servo channel 6; the real-time simulation computer and the motion control computer are connected through Ethernet, the servo channel includes a servo driver and an electromechanical actuator, and the servo driver includes a servo main loop frequency conversion power amplifier circuit module And the control loop circuit module, the electromechanical actuator connects the servo motor, the synchronous belt transmission box, the ball screw pair and the rotary encoder to form a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More