

Unmanned aerial vehicle depth image acquisition method and unmanned aerial vehicle
A depth image and acquisition method technology, applied in the field of image processing, can solve problems such as inability to accurately measure depth information, limited space for small drones, and limited measurable range, so as to avoid energy attenuation, reduce measurement costs, and apply to the field wide effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings, wherein the same or similar reference numerals refer to the same or similar elements or elements having the same or similar functions throughout. The embodiments described below with reference to the accompanying drawings are exemplary, only used to explain the present invention, and should not be construed as a limitation of the present invention.
[0044] The following describes a method for acquiring a depth image of an unmanned aerial vehicle and an unmanned aerial vehicle according to the embodiments of the present invention with reference to the accompanying drawings.
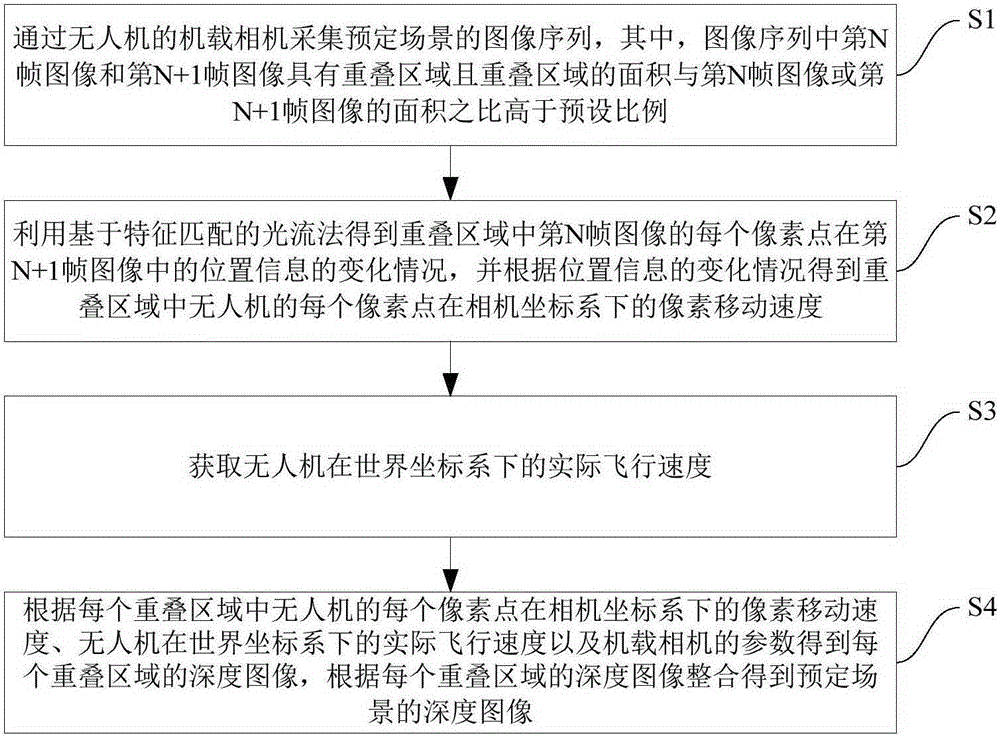
[0045] figure 1 It is a flowchart of a method for acquiring a depth image of a UAV according to an embodiment of the present invention. like figure 1 As shown, the method includes the following steps:
[0046] Step S1: the image sequence of the predetermined...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More