

Novel spherical robot capable of being carried with two different visual cameras
A robot and camera technology, applied in the field of new robot technology development, can solve the problems of difficulty in accurately obtaining the position, speed and motion parameters of a spherical robot, difficulty in ensuring the stability of spherical robot motion, lack of external measurement sensors, etc., and achieve large-scale operation. Speed and flexibility, easy installation and placement, and controlled effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with accompanying drawings and examples.
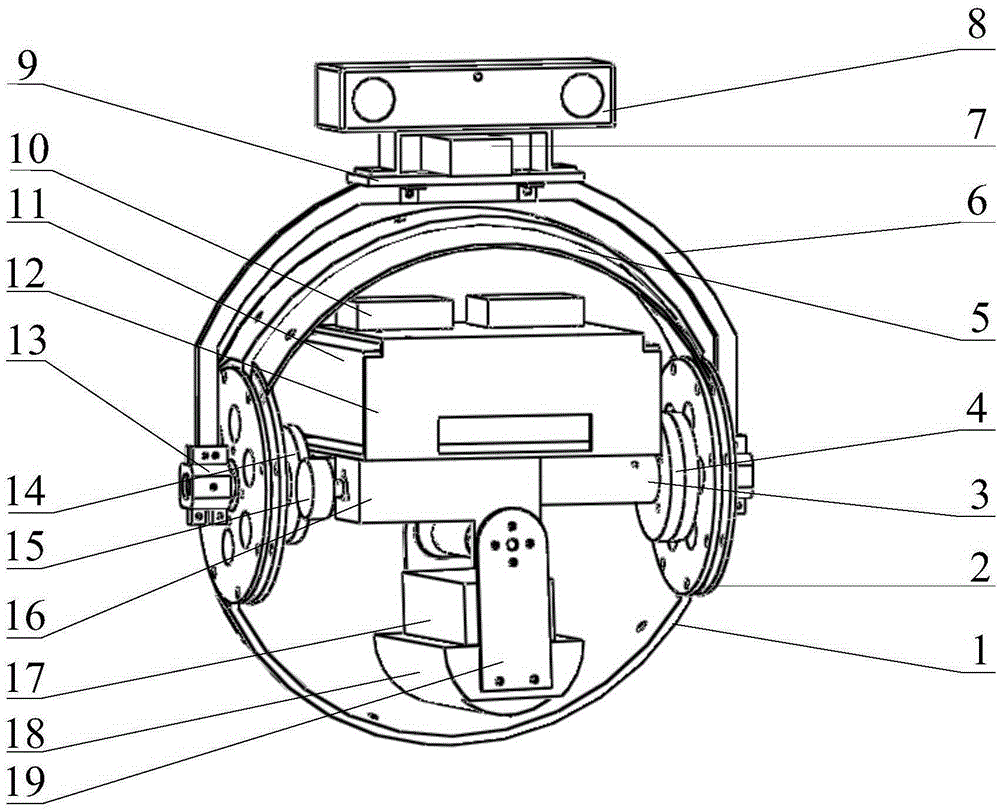
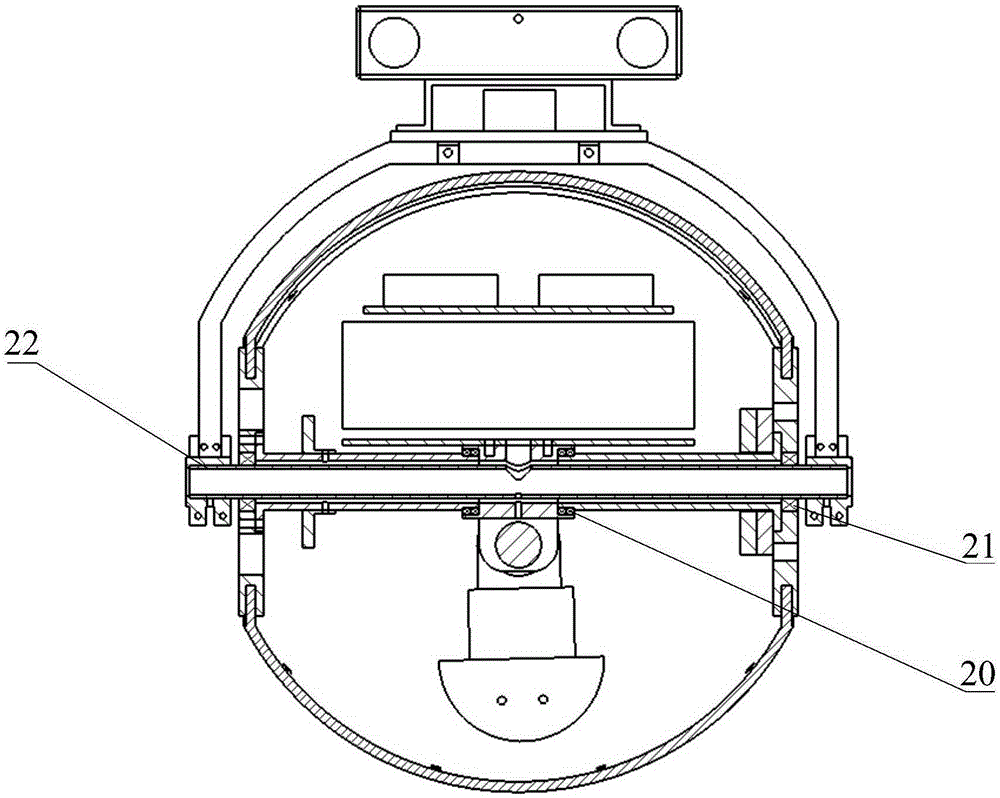
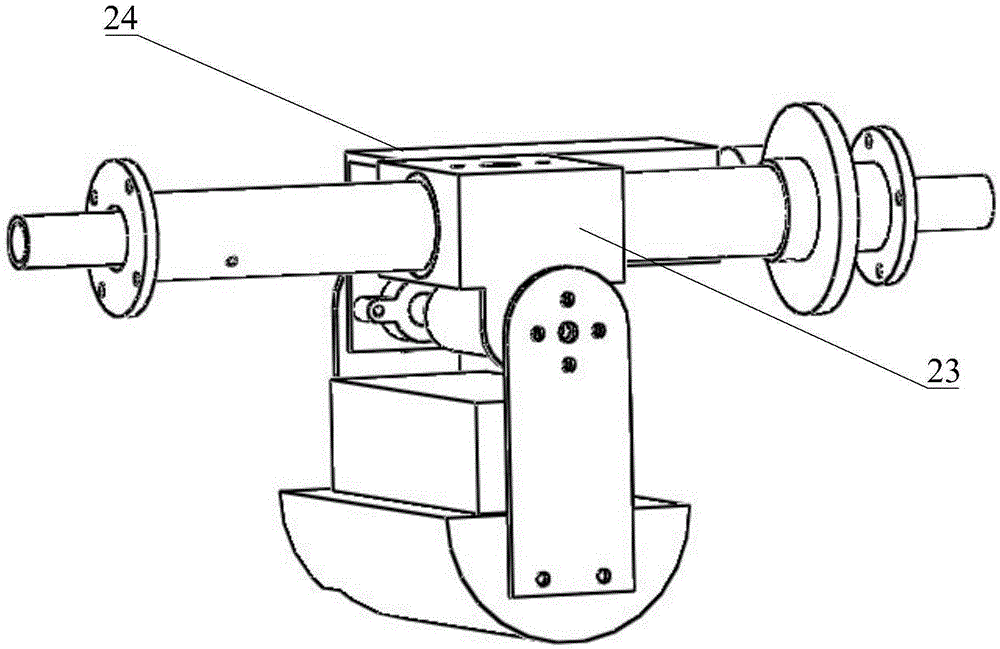
[0031] Such as figure 1 Shown is the structure diagram of a spherical robot with a binocular vision camera installed. figure 2 It is a cross-sectional structure diagram of a spherical robot equipped with a binocular vision camera. image 3 It is the internal frame and re-swing structure diagram of the spherical robot. Figure 4 It is the internal frame and re-swing side view of the spherical robot. Figure 5 It is a structural diagram of a spherical robot with left and right vision cameras. Figure 6 It is a cross-sectional structure diagram of a spherical robot with left and right vision cameras installed. As shown in the figure, a spherical robot that can carry two different vision cameras is mainly composed of a homogeneous spherical shell, a camera mounting mechanism, an internal drive mechanism, a vision module, and a heavy pendulum. Among them, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More