

Navigation and positioning method for indoor mobile robot
A mobile robot, navigation and positioning technology, applied in the field of navigation, can solve the problems of high system stability performance requirements, complex wireless sensor response network system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention is described in more detail below in conjunction with accompanying drawing example:
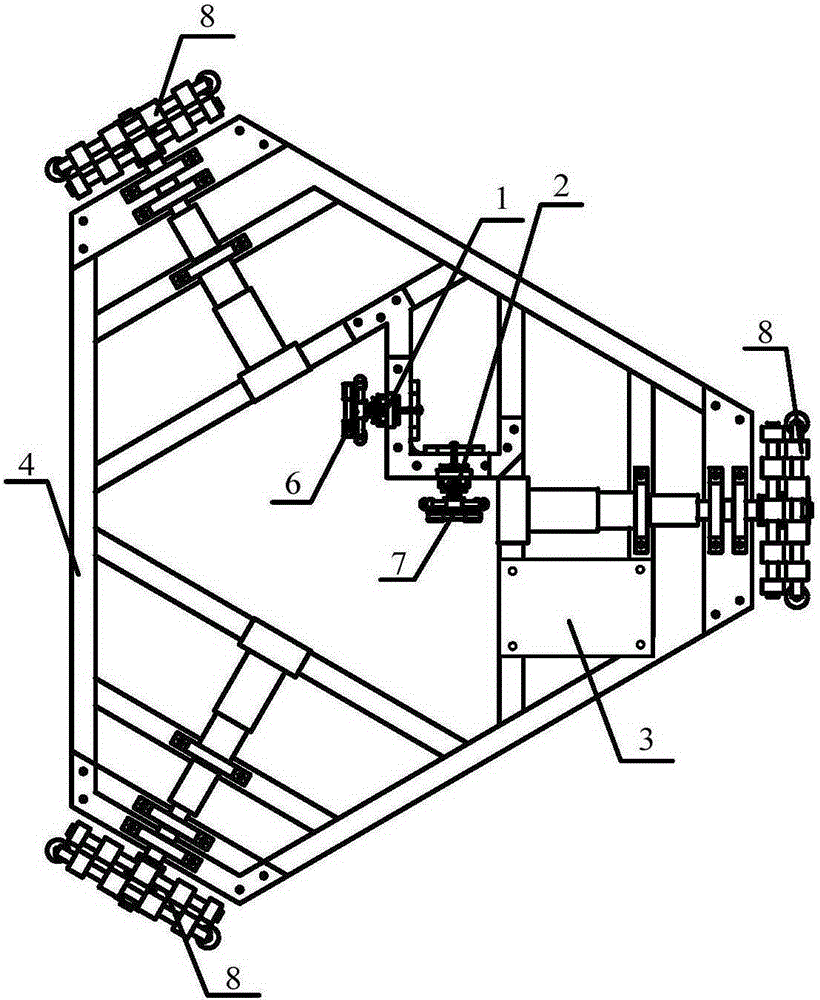
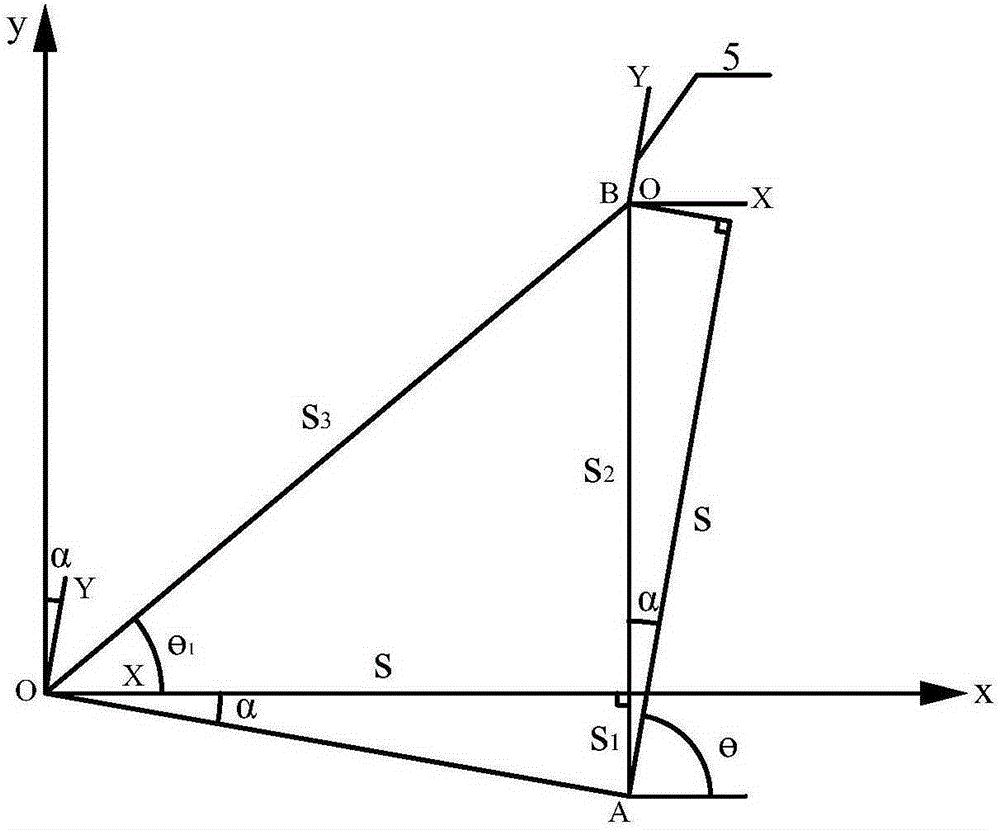
[0045] to combine Figure 1-7 , the technical solution of the present invention is: a positioning method for an indoor mobile robot based on a positioning code disc and a single-axis fiber optic gyroscope, including an omnidirectional mobile robot, two encoder axes that are not parallel and are distributed at any angle. and a single-axis fiber optic gyroscope.
[0046] The present invention provides a positioning method for an indoor mobile robot based on a positioning code disc and a gyroscope. The specific implementation steps are as follows:
[0047] The passive omnidirectional wheel 6 is installed on the encoder 1, and the passive omnidirectional wheel 7 is installed on the encoder 2, both of which are installed on the code disc mounting frame. The specific assembly relationship is as follows: Figure 4 As shown, and the installation position of the position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More