An artificial muscle device
A technology of artificial muscles and ropes, which is applied in the field of artificial muscles, can solve the problems of limited use environment, difficult control, and no consideration of parallel elastic units, etc., and achieve good transmission flexibility and safety, overall simple structure, and convenient and quick adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following examples describe the present invention in more detail.
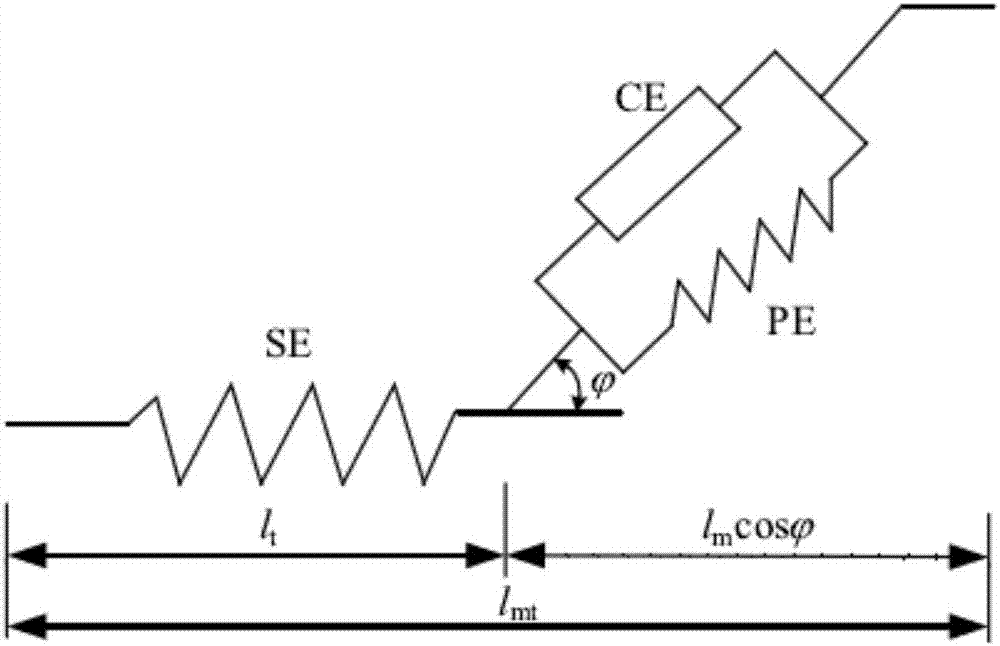
[0022] combine figure 1 , the structural form of the artificial muscle of the present invention is: a parallel elastic unit PE and a contraction unit CE form a parallel structure, and combine with a serial elastic unit SE to form an artificial muscle device composed of Hill three elements, the length of the artificial muscle l mt is the length of the series elastic unit l t and contracted original length l m The sum projected along the length of the muscle, that is in For the muscle feathery horns. considered in this invention So the length of the muscle is l mt = l t +l m .
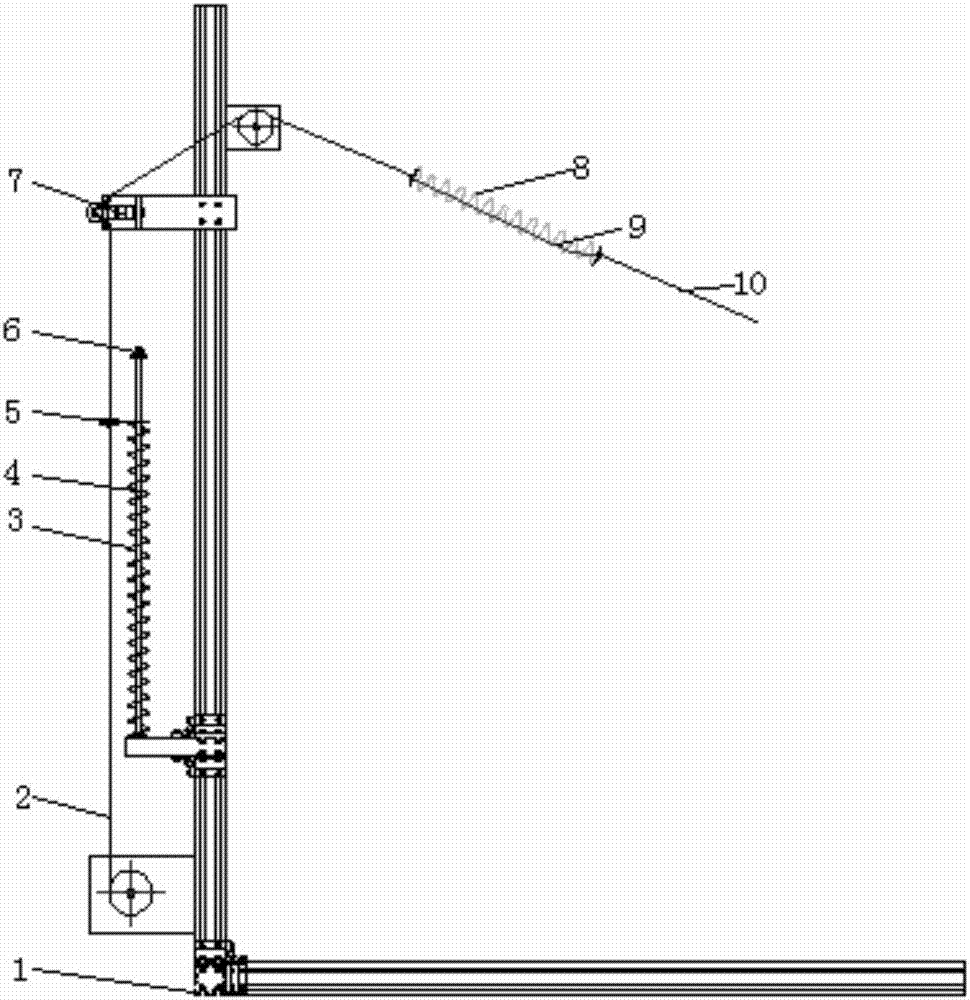
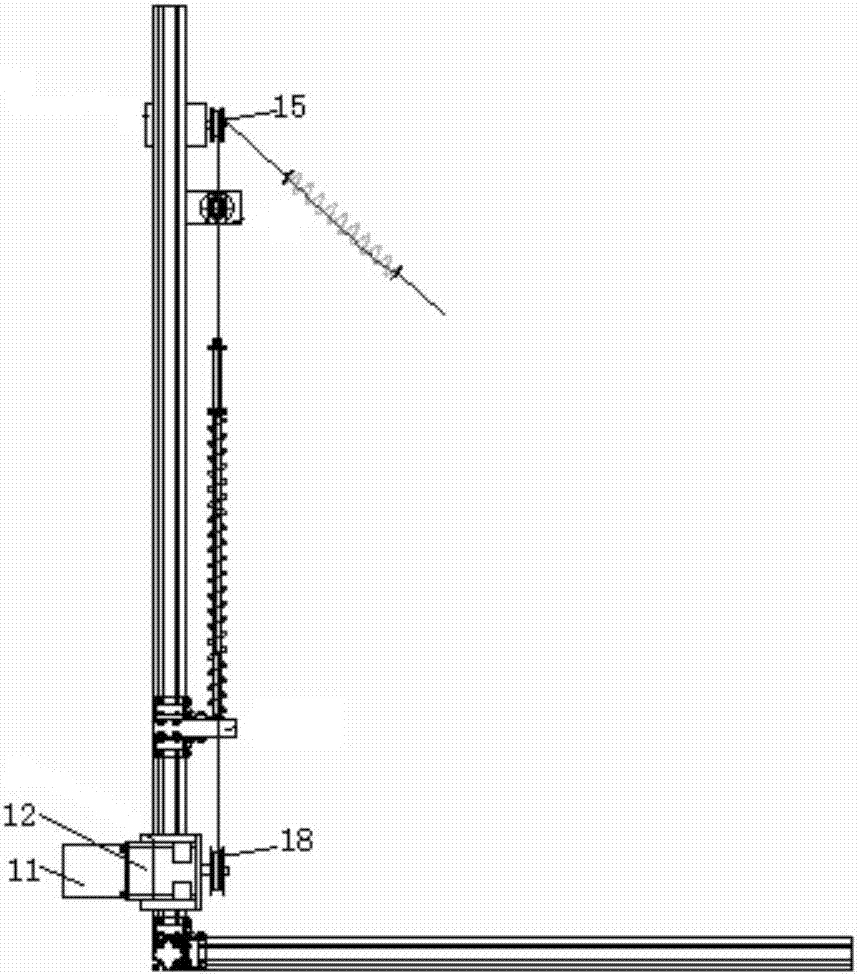
[0023] combine Figure 2-3 , The composition of the artificial muscle system of the present invention includes: a frame 1 as a support system, a flexible cable driving device, a first spring with selectable stiffness, a second spring with selectable stiffness, a guiding and limiting device, and a detection device...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More