

AUV navigation method based on sonar-assisted autonomous navigation
A technology of autonomous navigation and navigation method, applied in directions such as navigation, mapping and navigation, and re-radiation of sound waves, which can solve problems such as the difference between the ideal detection trajectory and the actual value, and the accumulation of positioning errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with accompanying drawing.
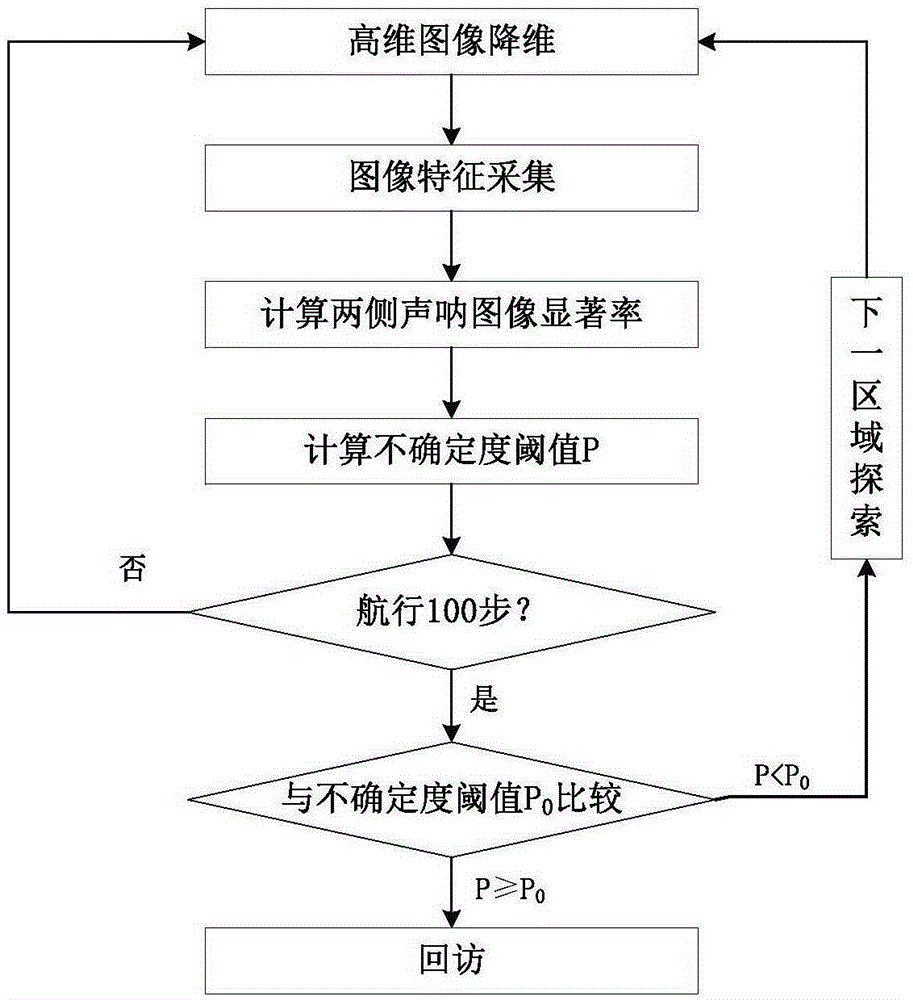
[0046] like Figure 1-2 As shown, the AUV navigation method based on sonar-assisted autonomous navigation of the present invention includes the following steps:
[0047] Step 1. The AUV dives into the seabed, and the side-scan sonar works to collect the image features of the seabed;
[0048] Step 2. Perform dimensionality reduction processing on the high-dimensional submarine sonar detection image data:
[0049] Use the bag of words BoW local feature expression model to describe the seabed detection image to meet the rapid response ability to massive observation information;
[0050] Step 3. Calculate the feature saliency rate of the sonar images on both sides respectively:
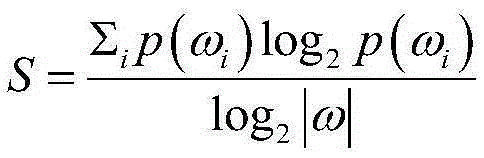
[0051] The normalized image entropy is used to represent the feature saliency rate of the sonar image,
[0052] S = Σ i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More