

Active fault tolerance control method of four-rotor aircraft based on sliding-mode observer
A technology of quadrotor aircraft and sliding mode observer, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as disasters, single fixed structure, lack of human real-time manipulation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further explained below in conjunction with the accompanying drawings.
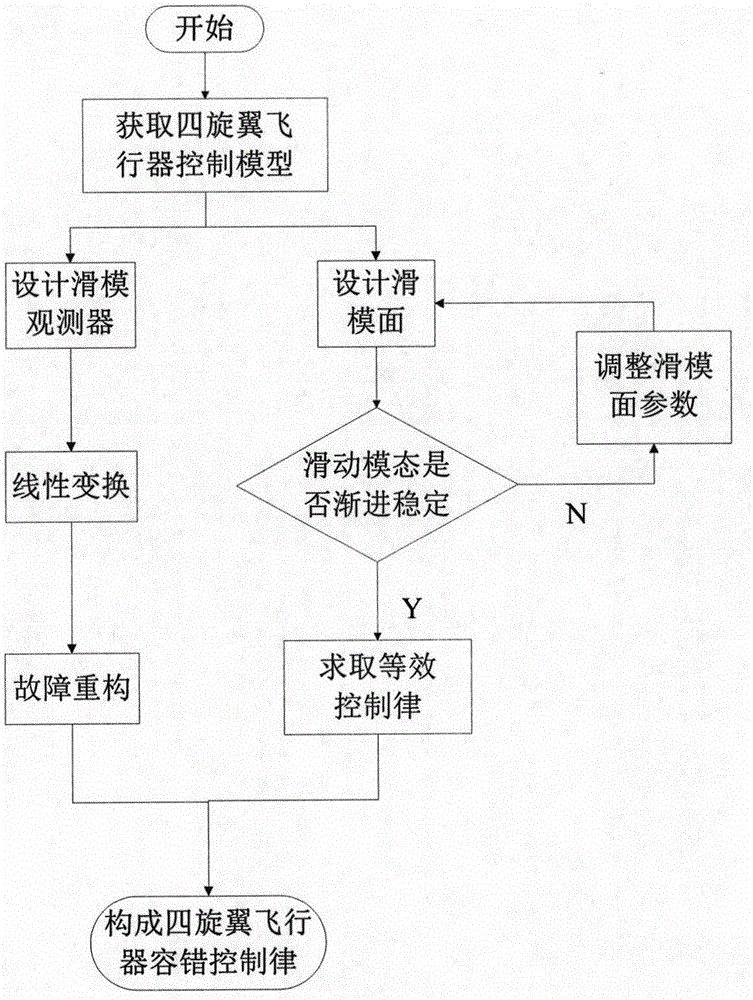
[0066] Such as figure 1 As shown, considering the actuator failure of the quadrotor aircraft in the presence of state time-delay, an active fault-tolerant control method is proposed by combining the sliding mode observer and sliding mode control, so that the aircraft can continue to fly safely after the actuator failure occurs. A sliding mode observer is designed, the system is linearly transformed, the actuator fault is reconstructed based on the idea of equivalent error injection, and the compensation control is added to the sliding mode control by using the reconstructed estimated value of the actuator fault, finally forming a complete active fault-tolerant controller. Including the following specific steps:
[0067] Step 1) Obtain the control model of the quadrotor aircraft:
[0068] x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More