Synchronous orbit electric propulsion position maintenance and angular momentum unloading joint control method
A technology of angular momentum unloading and synchronous orbit, applied in three-dimensional position/course control, attitude control, etc., which can solve problems such as different ignition parameters, no consideration of angular momentum unloading requirements, complex calculations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
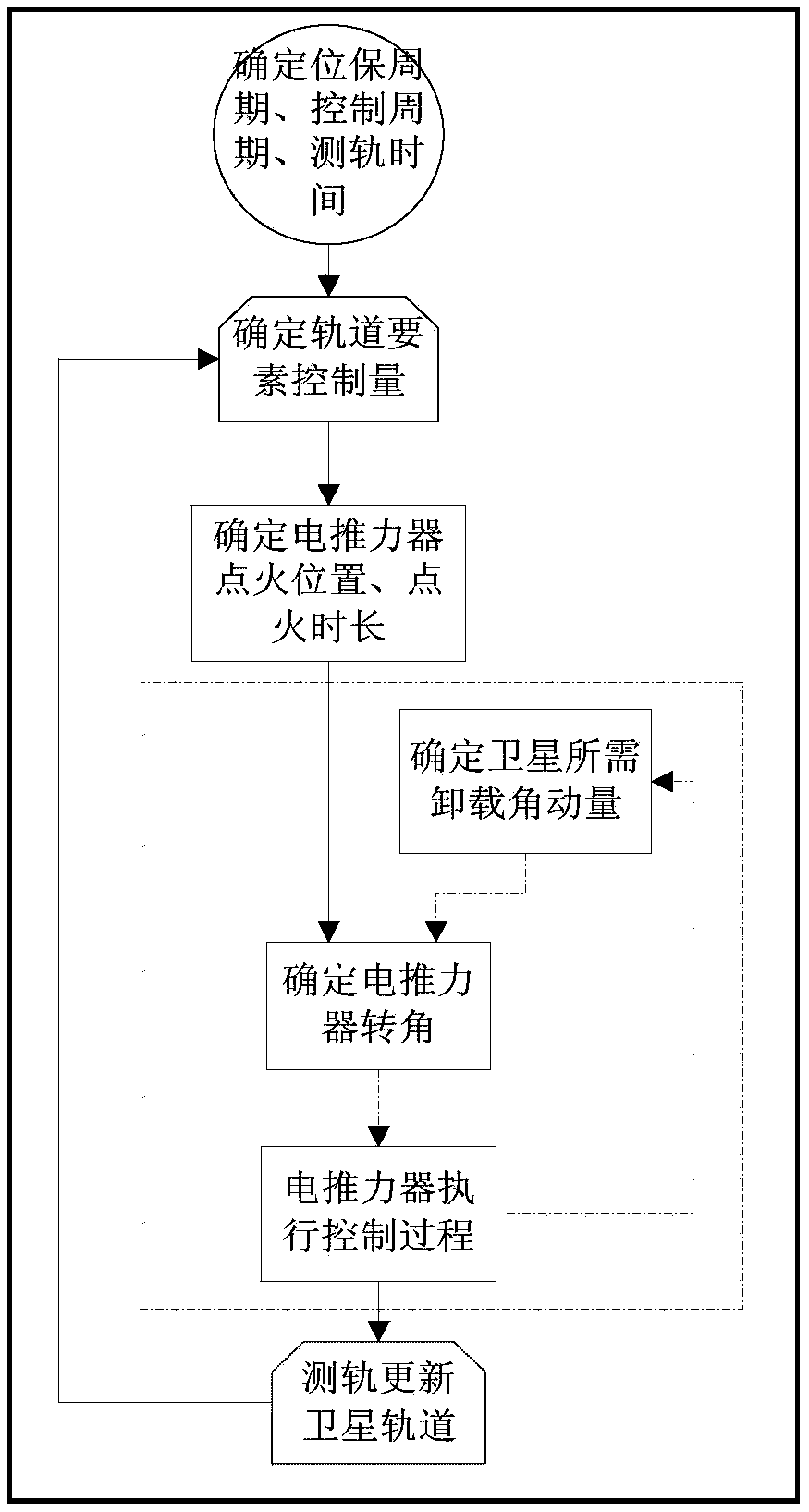
[0092] The principle of the present invention: in step one, parameters such as the position holding period can be directly determined according to external input conditions such as the time required for orbit measurement and position holding accuracy requirements, avoiding blindness in parameter selection; step two, the orbit element control amount is calculated according to orbit measurement data The calculation process requires parameters such as the solar mean longitude, the relative Julian day and the time of the vernal equinox, which need to be provided on the ground or on the stars. The calculation process of the mean longitude control quantity adopts the coordinate rotation search algorithm, and the solution process requires iteration; step three is Calculate the ignition parameters of each electric thruster: ignition start time and ignition time. The calculation process requires the orbital element control value obtained in step 2 as input, as well as electric thruster th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More