

Control system of humanoid biped robot
A biped robot and control system technology, applied in general control systems, control/regulation systems, attitude control, etc., can solve calculations that do not take joint angles into account, make it difficult to ensure real-time robot control, and achieve a large amount of feedback and other problems, to achieve the effect of fast computing speed, reliable performance and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to further understand the present invention, the preferred embodiments of the present invention are described below in conjunction with examples, but it should be understood that these descriptions are only to further illustrate the features and advantages of the present invention, rather than limiting the claims of the present invention.
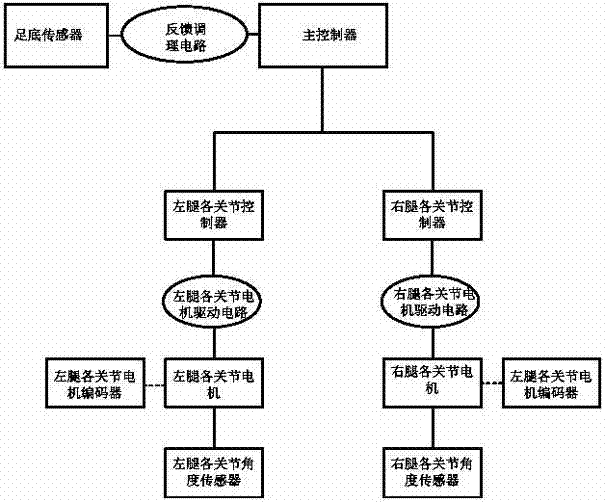
[0027] The invention provides a control system applied to a humanoid biped robot. The robot includes a total of 12 degrees of freedom in two legs, wherein each of the left leg and the right leg includes three degrees of freedom of the hip joint and one knee joint. Degree of freedom, the ankle joint has two degrees of freedom, and each degree of freedom corresponds to a joint motor.
[0028] as attached figure 1 As shown, the control system of the present invention mainly includes a main controller installed on the robot body, a joint controller corresponding to each joint motor, a motor drive circuit, a motor encoder, a join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More