

Robot-assisted surgery surgical drill instrument with force sensing function
A robot-assisted, six-dimensional force sensor technology, applied in the field of surgical drills, can solve the problems of stability and position accuracy difficult for doctors to achieve better surgical results, high transmission precision, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with specific embodiments.
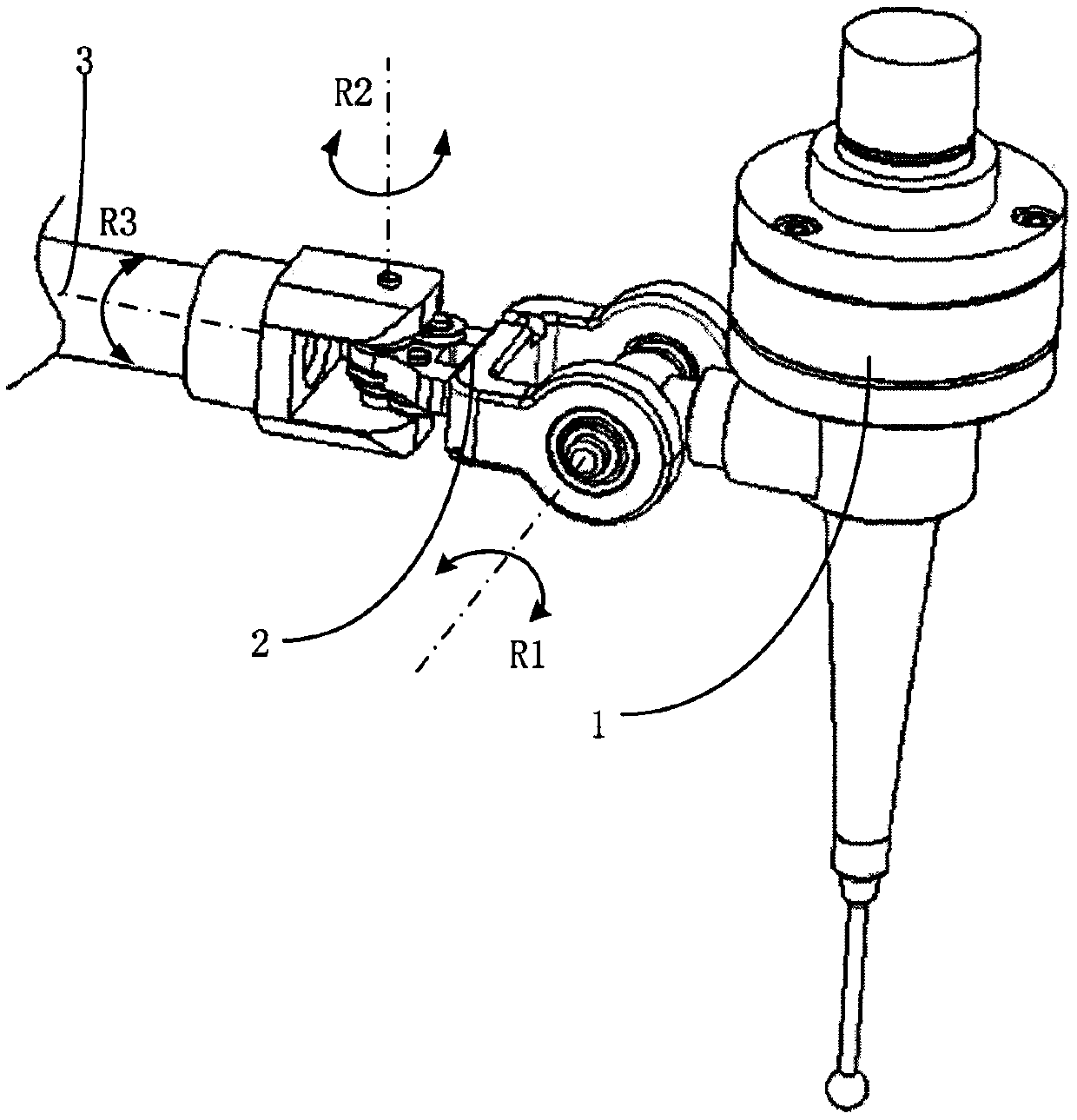
[0025] figure 1 It is a schematic diagram of the overall structure of the surgical drill instrument with force sensing function for robot-assisted surgery of the present invention, which includes an end effector part 1 , a pitch-yaw part 2 and an autorotation part 3 . The surgical instrument has three degrees of freedom: pitch freedom R1, yaw freedom R2 and rotation freedom R3. Solve the problem of sensing the contact force of the surgical drill during the operation, inaccurate positioning of the artificial operation, unstable operation, and easy damage to the facial nerve and tissue.
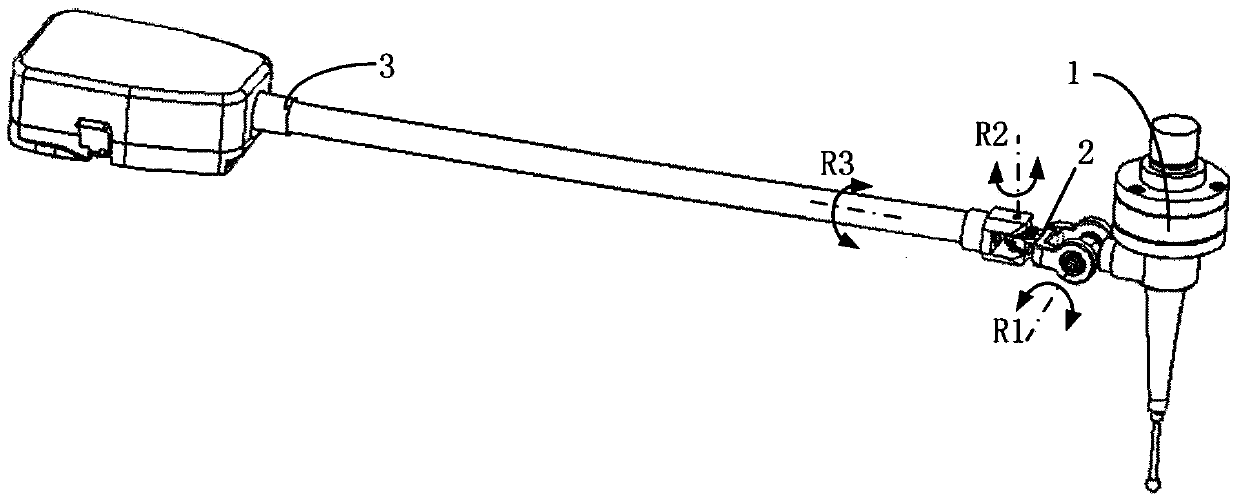
[0026] figure 2 Schematic diagram of the installation and implementation of the surgical drill with force sensing function of the present invention. The surgical drill of the present invention can be installed on the quick-change interface. For details of the quick-change interface, see...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More