

On-orbit service relative navigation experiment platform and work method
A relative navigation and experimental platform technology, applied in the field of relative navigation of non-cooperative spacecraft, can solve the problems of high cost investment and inability to fully simulate 3 translational degrees of freedom and 3 rotational degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
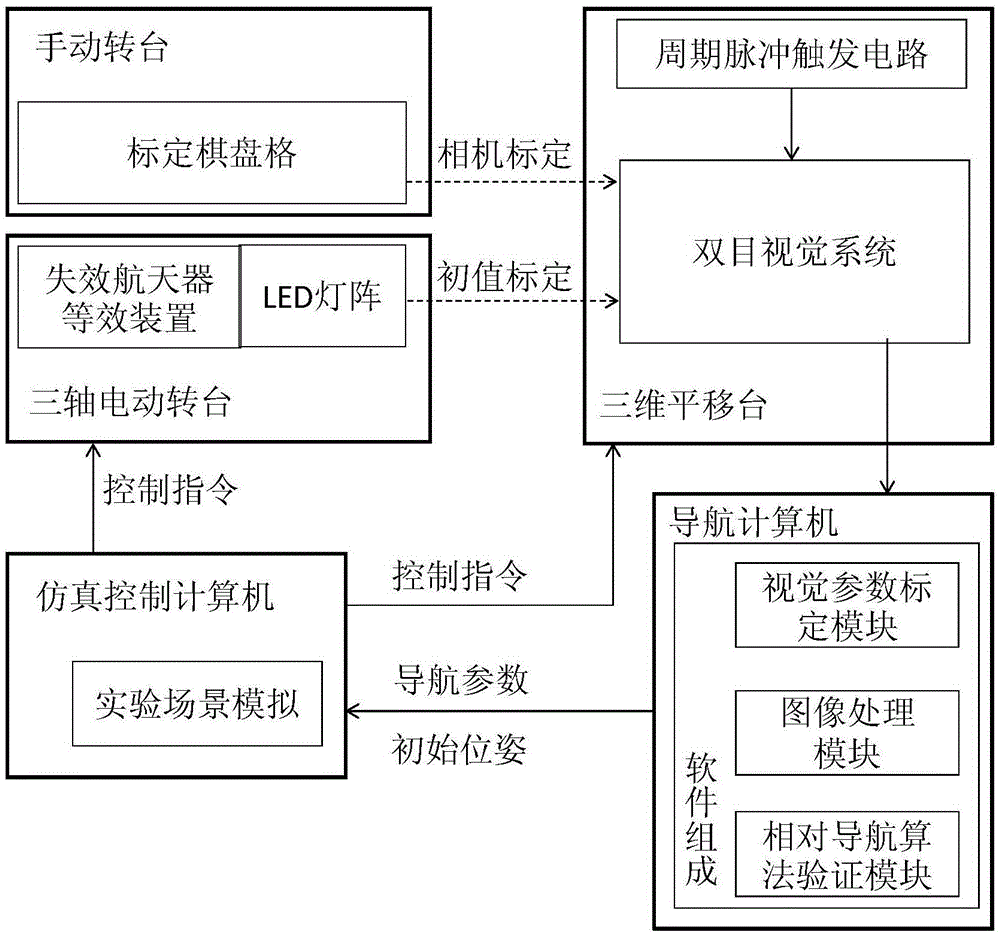
[0081] A kind of on-orbit service relative navigation experiment platform of this embodiment, such as figure 1 , 2 As shown, it includes a manual turntable, a checkerboard calibration board, a three-axis electric turntable, a three-dimensional translation platform, a simulation control computer, an equivalent device for a faulty spacecraft, a binocular stereo vision system and a navigation computer system, among which:
[0082] The checkerboard calibration plate is set on the manual turntable, and the equivalent device of the faulty spacecraft is installed on the three-axis electric turntable. The surface of the equivalent device of the faulty spacecraft is equipped with a calibration feature point group for the initial use of the experimental platform. The feature point group Consists of LED lights. The feature point group used to calibrate the initial value of the relative pose is realized by 3 LED lights. The three LED lights are connected in series, and the light angle is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More