

Manipulator movement method and system
A motion system and manipulator technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unproposed motion trajectories, achieve the effects of improving flexibility, improving production efficiency, and saving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0069] Please refer to Figure 2-3 , Embodiment 1 of the present invention is: a kind of manipulator movement method, is used for controlling the motion between manipulator loading and unloading, comprises the following steps:
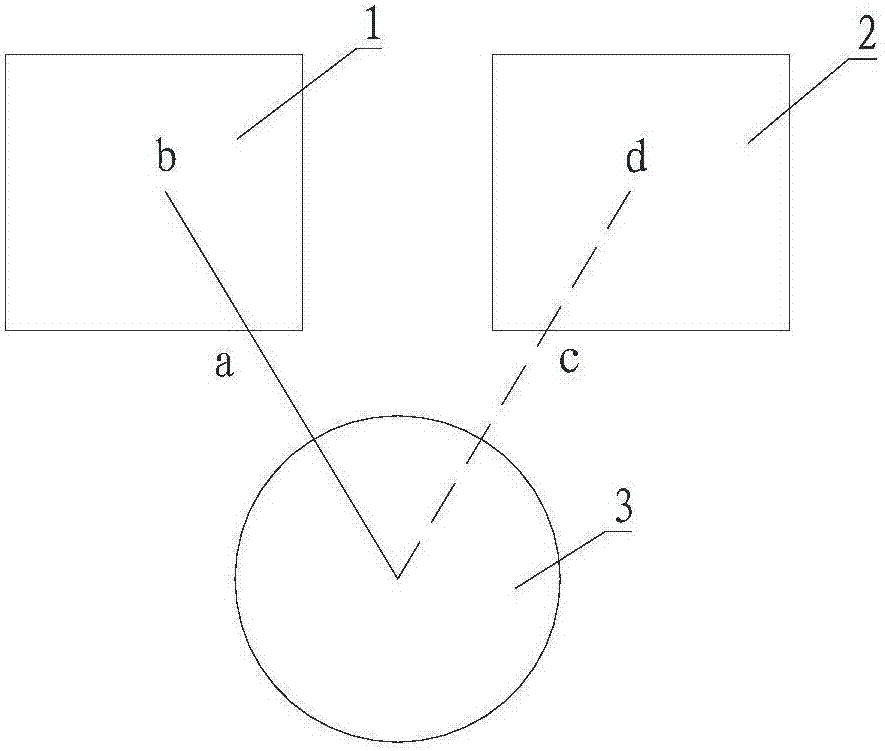
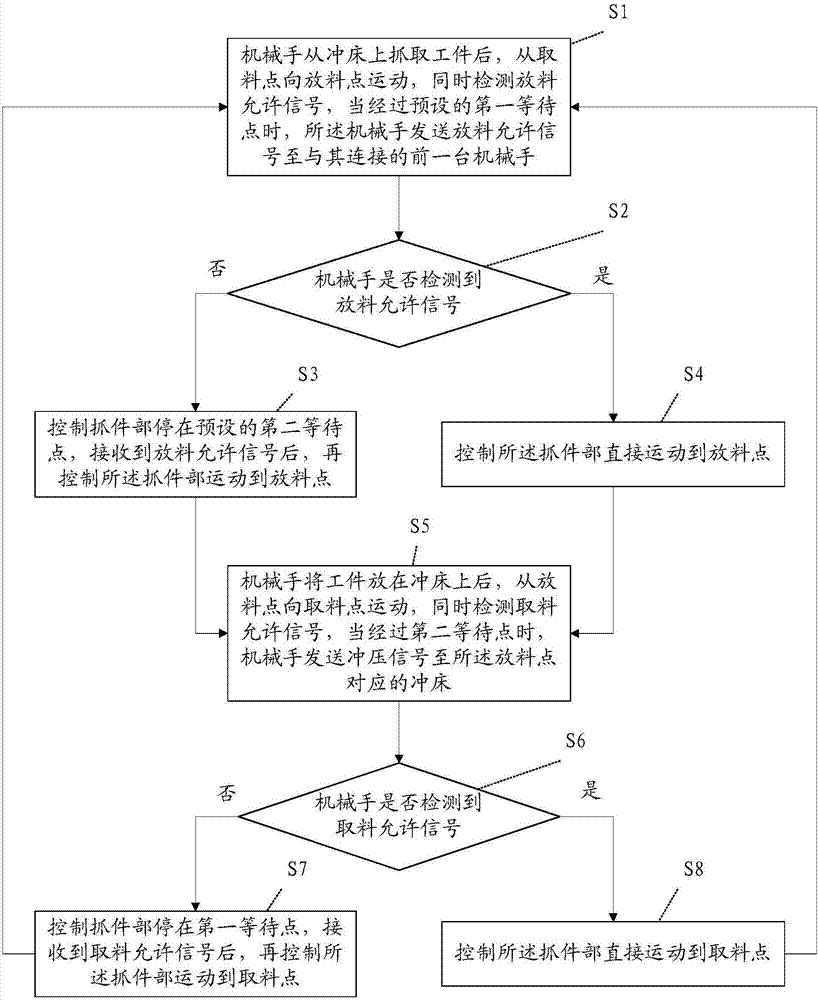
[0070] S1: After the manipulator grabs the workpiece from the punch corresponding to the pick-up point, it moves from the pick-up point to the discharge point, and at the same time detects the discharge permission signal. When passing the preset first waiting point, the manipulator sends the discharge Allows the signal to the previous robot connected to it.
[0071] S2: Judging whether the manipulator detects the material discharging permission signal, if not, execute step S3, and if yes, execute step S4.
[0072] S3: Control the gripping part to stop at the preset second waiting point, and control the gripping part to move from the second waiting point to the material discharging point when the manipulator receives a material discharging permission s...
Embodiment 2
[0083] Please refer to Figure 6-7 , the second embodiment of the present invention is a manipulator motion system corresponding to the above method, including
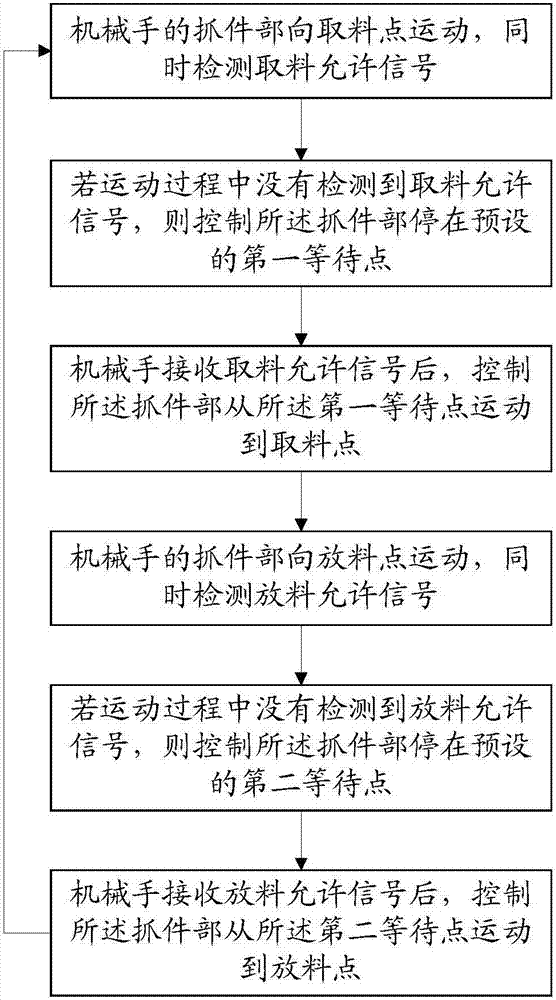
[0084] The first detection module 101 is used for the gripping part of the manipulator to move to the material retrieval point and simultaneously detect the material retrieval permission signal;
[0085] The first control module 102 is configured to control the gripping part to stop at the preset first waiting point if no material retrieving permission signal is detected during the movement;
[0086] The second control module 103 is used to control the gripping part to move from the first waiting point to the material picking point after the manipulator receives the material picking permission signal;
[0087] The second detection module 104 is used for the gripping part of the manipulator to move to the discharge point and simultaneously detect the discharge permission signal;
[0088] The third control module 105 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More