

Calibration method for relative attitude of binocular stereo camera and inertial measurement unit
A technology of inertial measurement unit and binocular stereo camera, which is applied in the direction of measuring devices, instruments, etc., to reduce errors and increase robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing, the method of the present invention is described in detail:
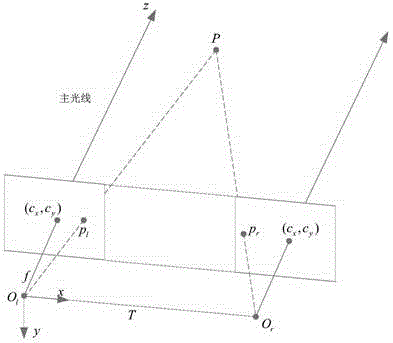
[0025] Step 1: Calibrate the binocular camera and obtain the internal and external parameters of the camera, including: focal length f, baseline length b, image center pixel position u 0 , v 0 , the correction matrix of the entire image, etc., the internal parameter matrix of the camera:
[0026]
[0027] Step 2: Turn on the binocular camera, collect left and right images continuously, and use the camera parameters obtained in step 1 to correct the image.
[0028] Step 3: Obtain the straight line equation of the thin line in the left image and the right image.
[0029] Step 3-1: You can use the Hough transform or manually select the endpoint of the thin line to obtain the equation of the line, and get the pixel coordinates of the endpoint of the thin line. Two points (u1l, v1l) and point (u2l, v2l) can be used to solve the parallax d=x l -x r Use the pri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More