

A method of anti-backlash synchronous control for dual-motor servo system
A dual-motor servo and synchronous control technology, which is applied in the direction of multiple motor speed adjustments, can solve the problems that the bias torque is proved, and the tracking performance of the system by the synchronous controller is not considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
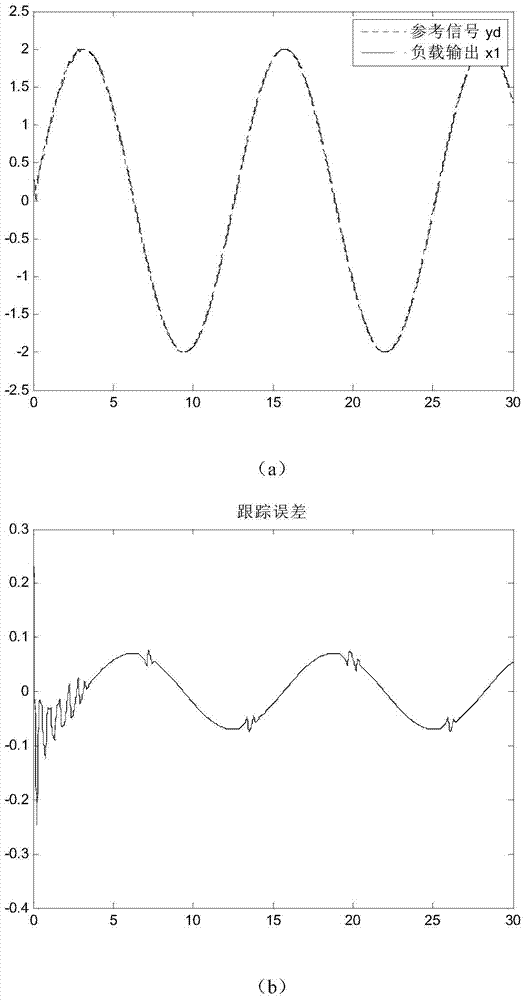
[0094] In this embodiment, an integrated controller of a dual-motor servo system is designed according to the method described in the content of the invention, and issues such as load tracking, motor synchronization, and backlash elimination are considered at the same time. And the particle swarm optimization algorithm can be used to solve the parameter tuning problem of the multi-coupling controller in the dual-motor controller. Select the objective function with error and energy consumption as the performance index, and optimize the controller parameters and switching function of the dual-motor servo system.
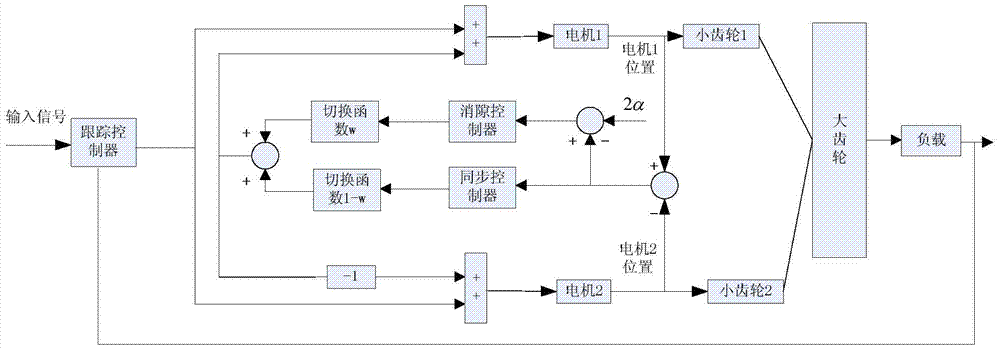
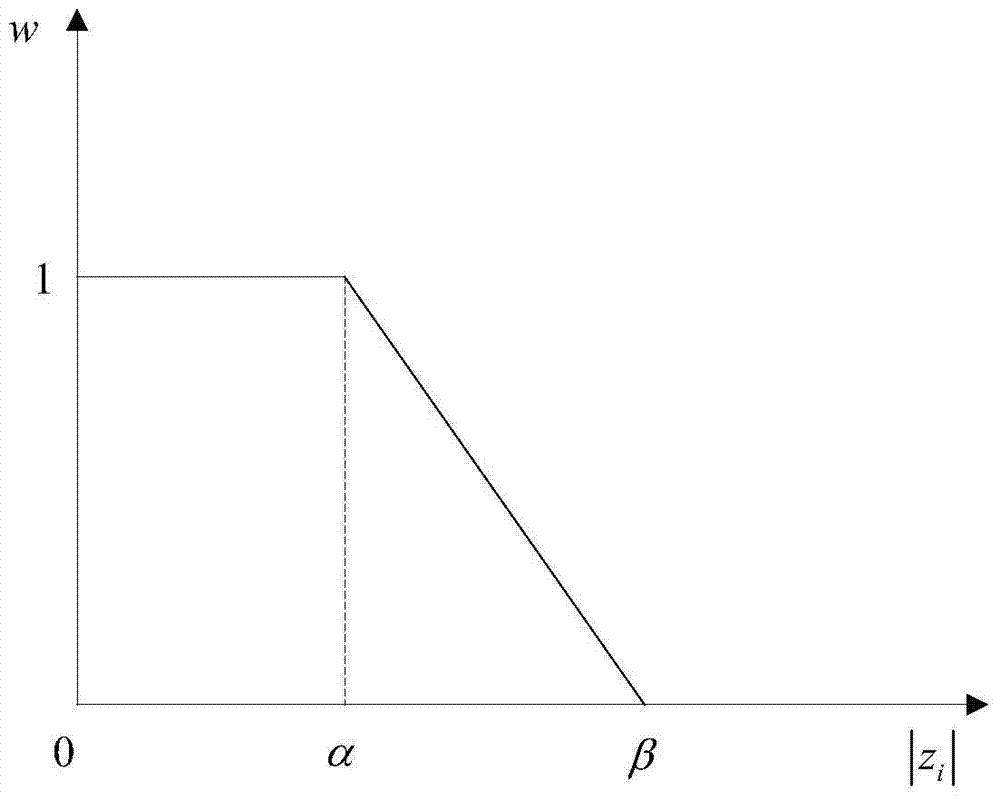
[0095] A backlash-eliminating synchronous control method for a dual-motor servo system disclosed in this embodiment includes the following steps:
[0096] Step 1: Analyze the dual-motor servo system with backlash, and use the dead zone model of backlash to establish the state space expression of the system.
[0097] According to the structure and physical laws of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More