

Autonomous obstacle removal type intelligent vehicle system
A technology for smart cars and car bodies, which is applied to manipulators, program-controlled manipulators, and manufacturing tools, etc., can solve the problems of limited space for fixed manipulators, and the inability of pure mobile robots to perform automatic removal of operations. The effect of uniformity, reducing volume and increasing grip friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with examples and drawings.
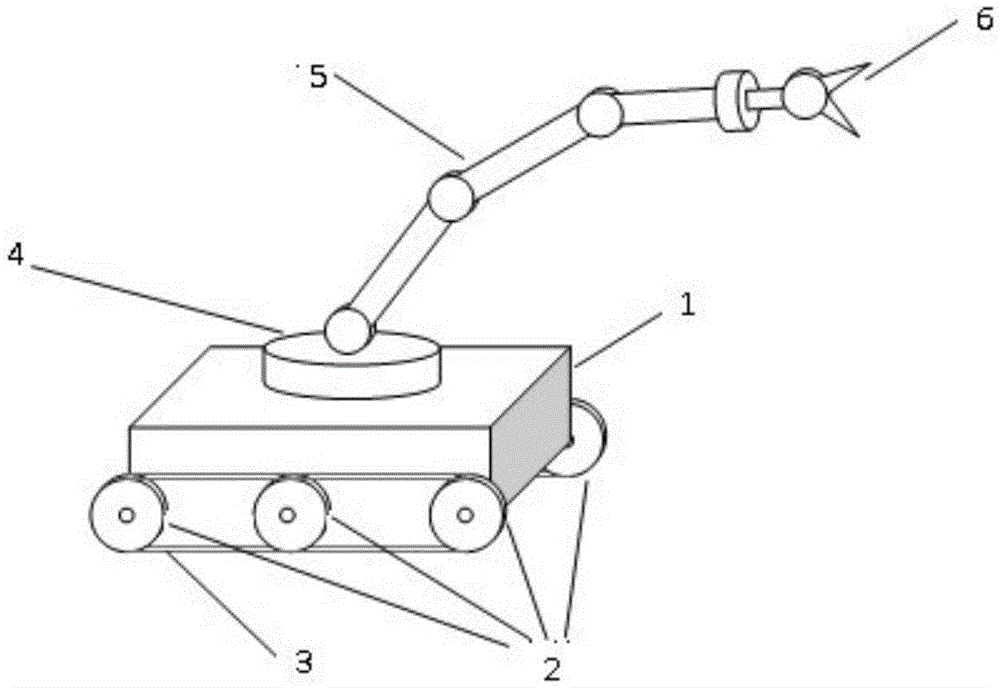
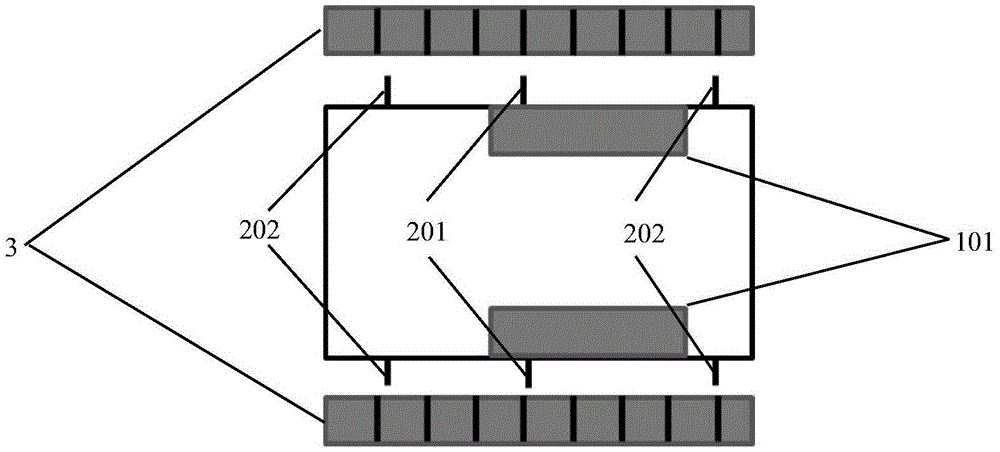
[0029] Such as figure 2 As shown, 301 are the crawlers on both sides of the car body 1, 101 are the on-board power supply, 201 are the driving wheels on both sides of the car body 1, and 202 are the driven wheels on both sides of the car body 1. The track 301 modules on the left and right sides of the car body are completely symmetrical. The left and right crawler 301 modules have their own independent drive systems, and each crawler 301 module can realize the basic operation functions of forward and reverse rotation with adjustable speed. When the two crawler 301 modules cooperate with each other, multiple sports modes can be completed. If the two wing modules move in the same direction and at the same speed, the smart car realizes straight forward or straight backward; if the two wing modules move at different speeds, the car body 1 will be prompted to generate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More