

Multi-dimensional force sensor calibration experiment data fitting method based on genetic algorithm
A multi-dimensional force sensor and genetic algorithm technology, applied in the field of multi-dimensional force sensor calibration experiment data fitting, can solve problems such as optimal solution offset and limited numerical accuracy, and achieve the effects of accurate and effective results and simple and reliable algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
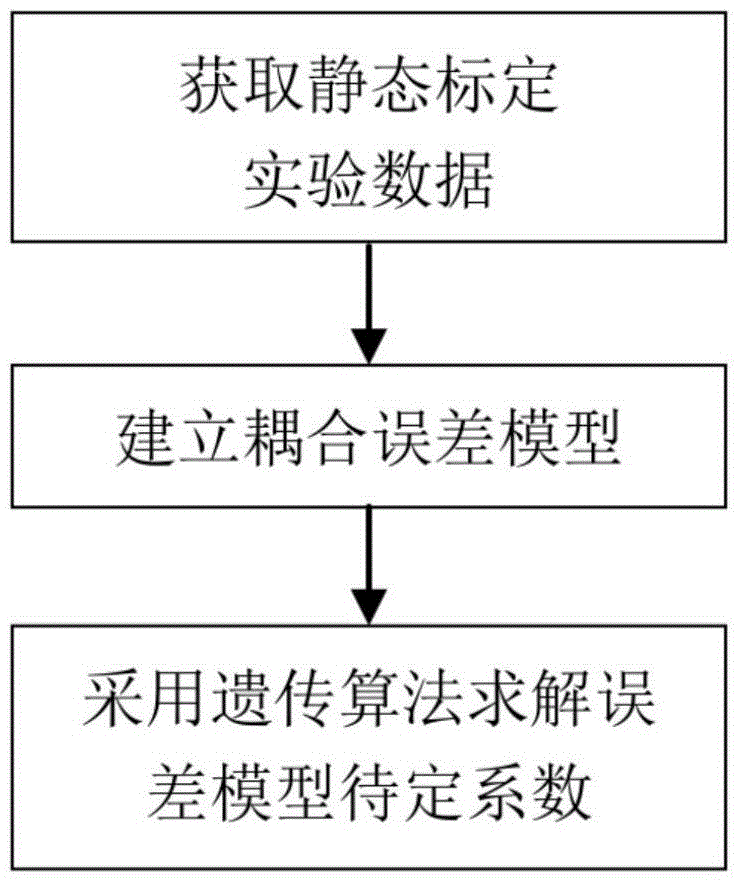
Method used
Image

Examples
Embodiment 1
[0091] Taking the cross-beam type six-dimensional force sensor developed by Jiangsu Key Laboratory of Remote Measurement and Control Technology of Southeast University as an example, the data fitting problem in the coupling error modeling of sensor decoupling calculation is studied.
[0092] The elastic body of the multi-dimensional force sensor adopts an integral spoke-type cross beam structure, and a full-bridge circuit is formed by strain gauges attached to the front, back and side of the cross beam, and the strain generated when the elastic body is subjected to force / torque is converted into a differential output voltage value .
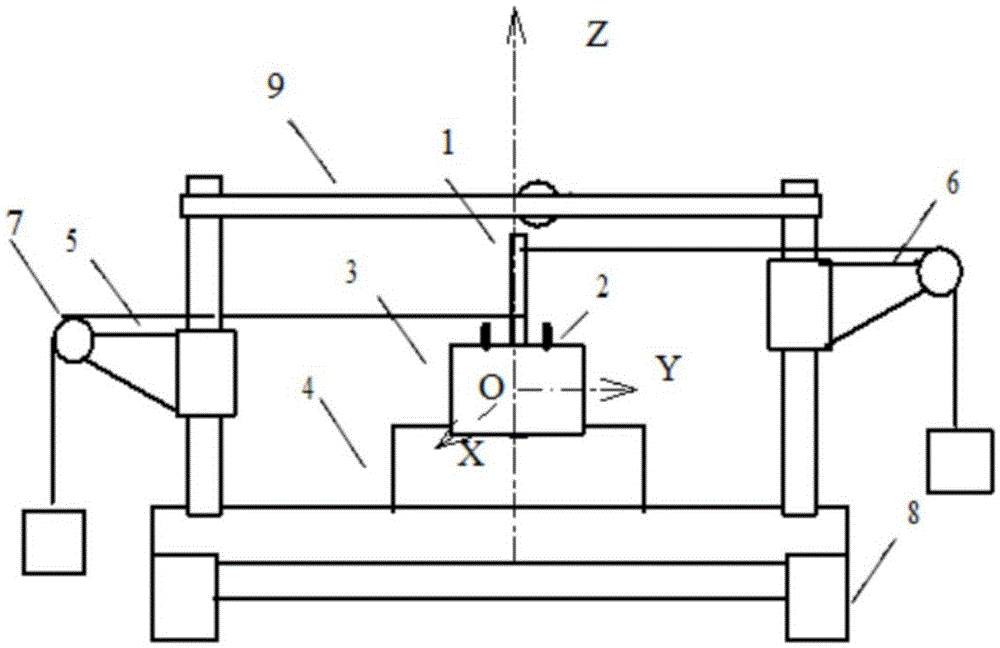
[0093] Such as image 3 As shown, it is a static calibration experimental device of the present invention, which consists of a force transmission shaft 1, a force column 2, a sensor 3, a dial 4, a left sliding rod 5, a right sliding rod 6, a pulley 7, a test bench base 8, an additional Pulley bar 9 forms.
[0094] The sensor 3 is fixed on a sca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More