

Exoskeletal rehabilitation robot for upper limbs
A technology for rehabilitation training and robotics, which is applied in the direction of manipulators, passive exercise equipment, program-controlled manipulators, etc. It can solve problems such as user injuries, failure to consider shoulder girdle movement, and human-machine joint axis mismatch.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
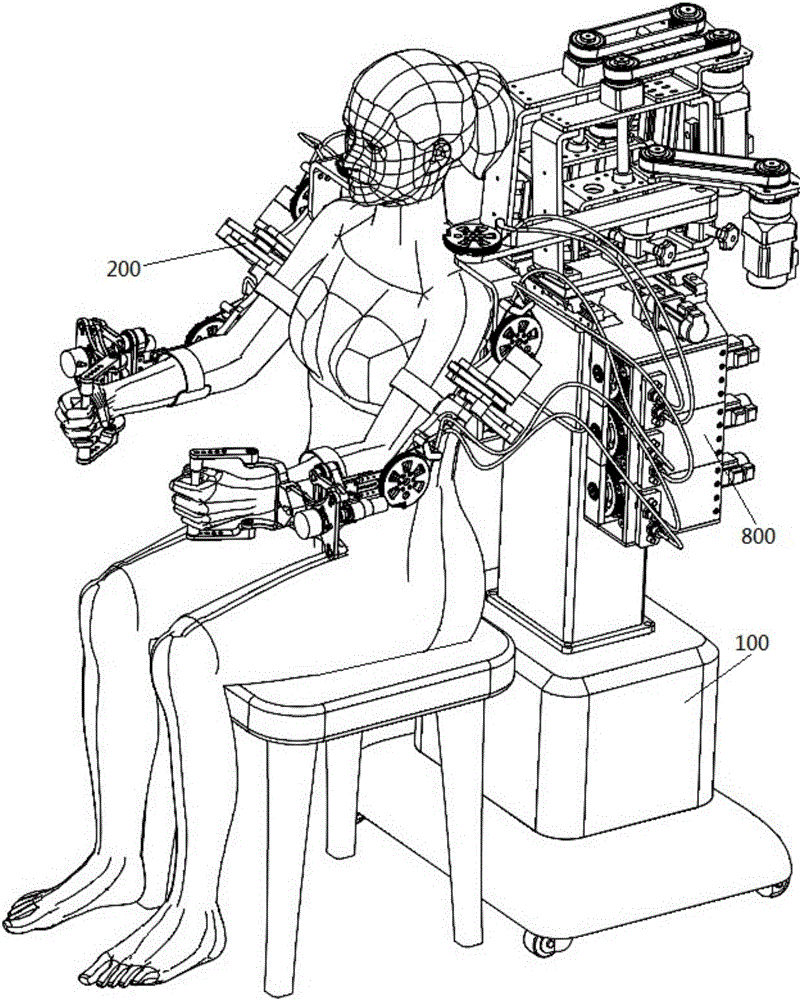
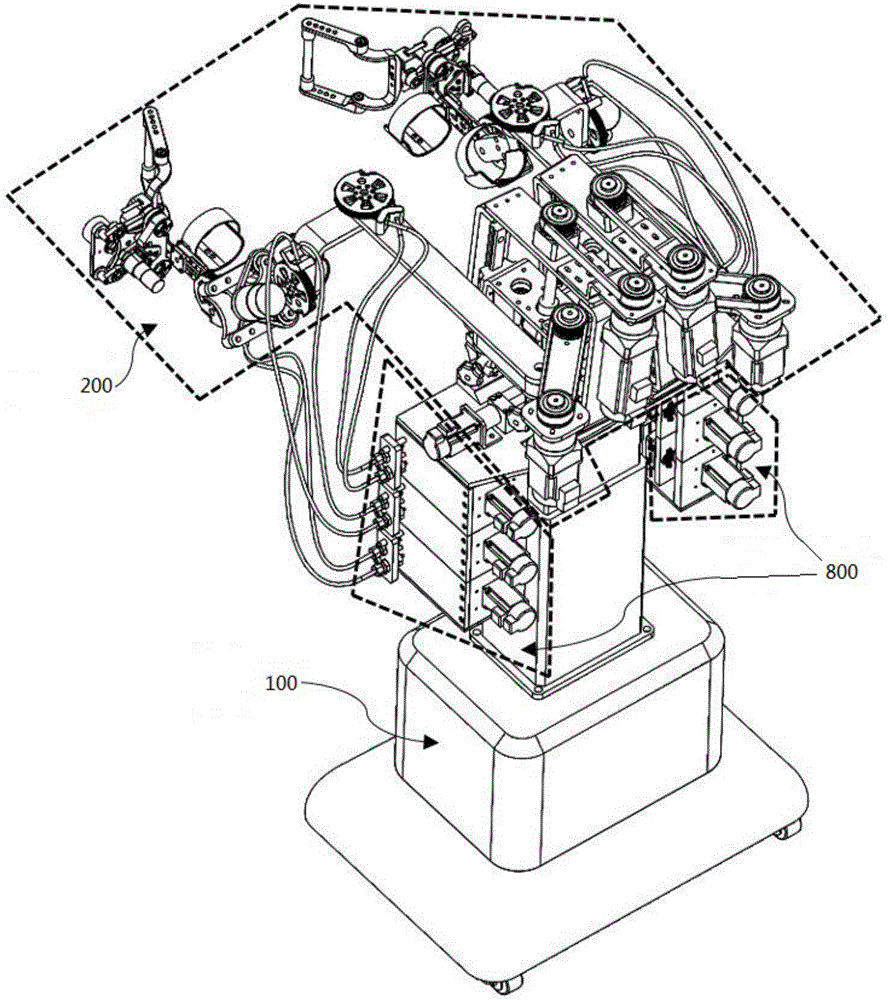
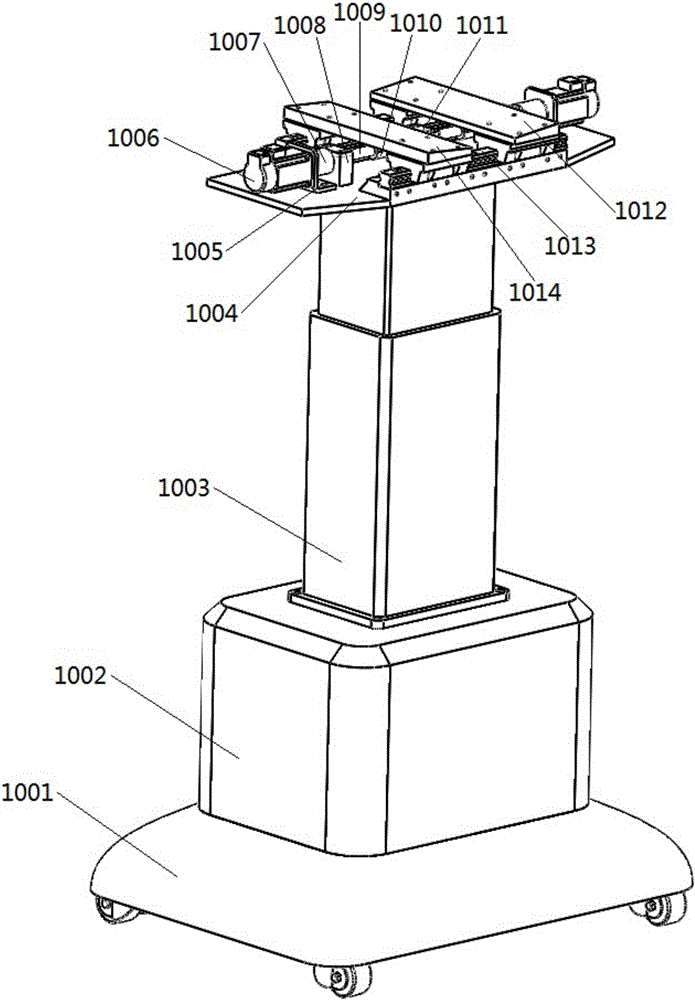
[0041] Please see attached figure 1 , attached figure 2 , attached image 3 , attached Figure 4 , attached Figure 10 and attached Figure 11 As shown, an exoskeleton type upper limb rehabilitation training robot includes a base 100, two mechanical arm assemblies 200 and six motor drive assemblies 800; the base 100 includes a mobile base 1001, an electrical box 1002, and an electric lifting column 1003, base platform 1004, motor mounting angle bracket 1005, base rotating motor 1006, coupling 1007, base main bearing seat 1008, base ball screw nut assembly 1009, base nut seat 1010, base common pair Bearing seat 1011, right bracket 1012, base linear guide assembly 1013 and left bracket 1014; the electrical box 1002 is fixedly installed on the mobile base 1001; the electric lifting column 1003 is fixedly installed on the electrical box 1002; the base...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More