

Real-time concurrent control system of six-degree-of-freedom eyeball type underwater robot
An underwater robot and control system technology, applied in underwater operation equipment, three-dimensional position/channel control, ships, etc., can solve the problems of low carrier frequency, high transmission delay, narrow underwater communication bandwidth, etc., to overcome the bandwidth narrow effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
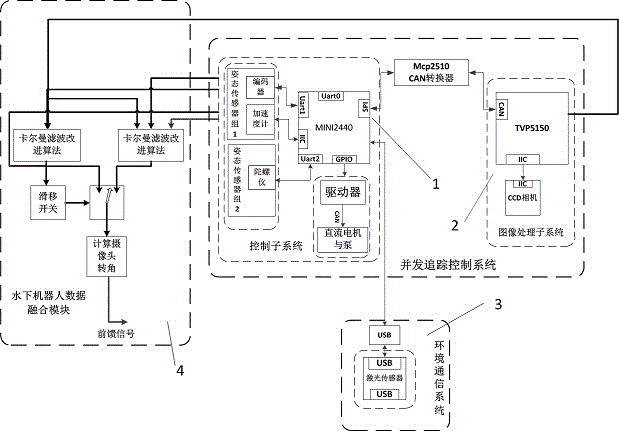
[0024] see figure 1, the real-time concurrent control system of the six-degree-of-freedom eyeball-type underwater robot includes a control subsystem 1, an image processing subsystem 2, a laser communication sub-module 3 and a data fusion module 4, and is characterized in that: the control subsystem 1 is connected to a laser The communication module 3 and the data fusion module 4 and the image processing subsystem 2 realize CAN bus high-speed communication through the CAN converter, and the two subsystems process data concurrently to realize real-time concurrent control of the underwater robot.
Embodiment 2
[0026] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
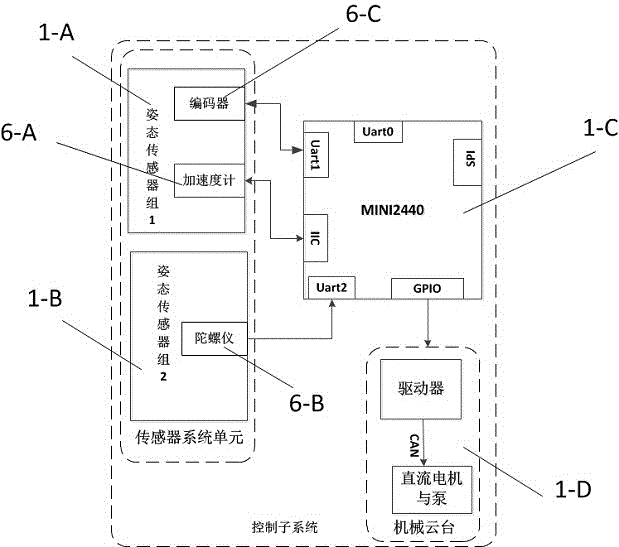
[0027] see Figure 1 to Figure 9 , the control subsystem 1 includes two groups of robot body attitude sensors 1-A, 1-B, a main control unit 1-C and a bottom drive module 1-D; the two groups of robot body attitude sensors 1-A, 1- B includes an accelerometer 6-A, a gyroscope 6-B and an encoder 6-C; the main control unit 1-C is connected to two groups of robot body attitude sensors 1-A, 1-B and the underlying drive module 1-D; In order to prevent the interference caused by the external environment, the control subsystem 1 uses two sets of robot body attitude sensors 1-A, 1-B to measure its own attitude, and transmits the two sets of data collected by the two sets of sensors to the data fusion In module 4, the processed data that is determined to be valid is used as the feedforward signal of the control system. Described image processing subsystem 2 comprises the visual syste...
Embodiment 3
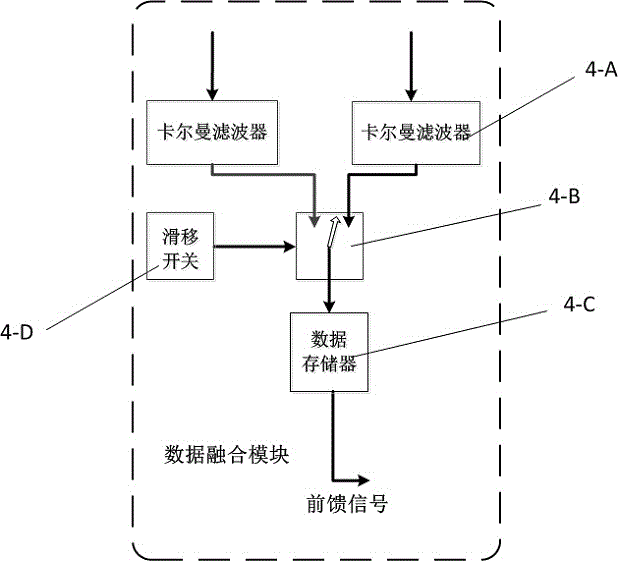
[0029] This six-degree-of-freedom eyeball-type underwater robot real-time concurrent control system includes a control subsystem 1, an image processing subsystem 2, a laser communication sub-module 3, and a data fusion module 4, wherein the control subsystem 1 includes a robot body posture sensor module 1- A. Airframe attitude sensor module 1-B, main control unit 1-C, bottom drive module 1-D; image processing subsystem 2 includes DSP main control unit 2-A, visual system 2-B composed of CCD camera; laser communication Submodule 3 includes a laser sensor and its peripheral interface 3-A; the data fusion module 4 includes a Kalman filter 4-A, a selection switch 4-B, a visual data memory 4-C, and a slide switch 4-D; the control Subsystem 1 is responsible for data collection, and controls the speed of the DC motor and the pump through PWM. The control schematic diagram is as follows: Figure 4 As shown, the accelerometer 6-A measures the X, Y, Z three-axis attitude information of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More