

Data fusion calibration method of catadioptric panorama camera and laser radar
A catadioptric panorama and lidar technology, which is applied in the field of data fusion of environmental perception systems, can solve problems such as the inability of cameras to fully display image information, the difficulty of joint calibration of images, and the inability of sensors to obtain accurate and complete environmental information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to further illustrate the technical solutions adopted by the present invention, the specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is only suitable for illustrating and explaining the present invention, and does not constitute a limitation to the protection scope of the present invention.
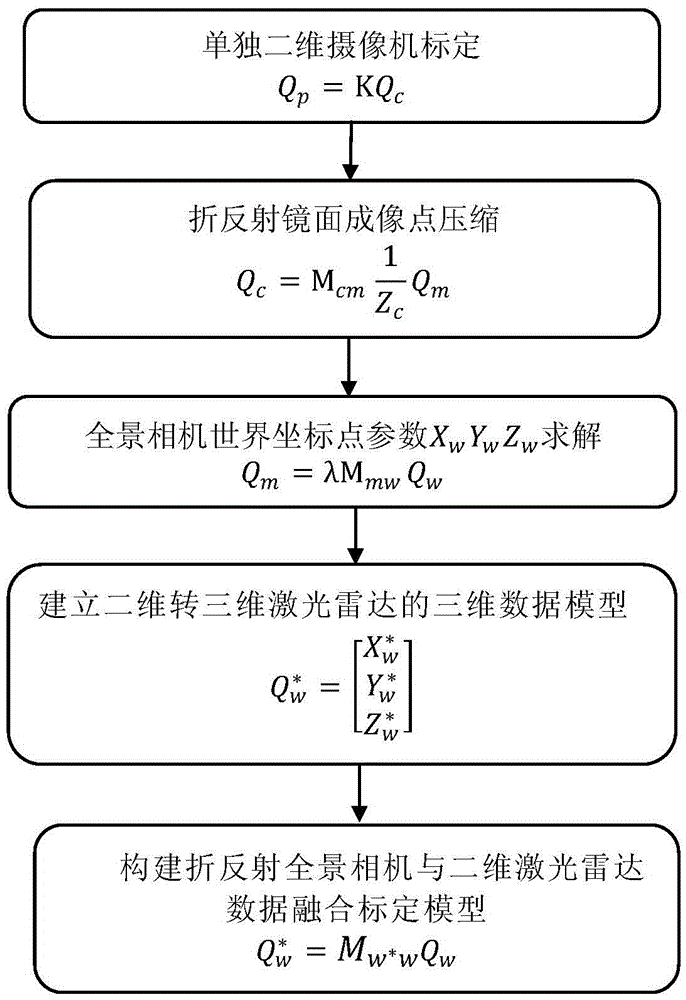
[0088] The present invention is a catadioptric panoramic camera and laser radar data fusion calibration method, such as figure 1 As shown, its joint calibration method includes steps:
[0089] 1. Calibration of a single two-dimensional camera, from the imaging coordinate point and the world coordinate point, the internal parameter calibration of the camera is carried out to obtain the internal parameter matrix K of the camera;
[0090] 2. The imaging point of the catadioptric mirror is compressed, and the parameter X of the refraction point of the catadioptric mirror i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More