

Macro-micro hybrid driven parallel mechanism measurement and control system, and control method thereof
A measurement and control system and hybrid drive technology, applied in computer control, general control system, control/regulation system, etc., to achieve the effect of high positioning accuracy, strong bearing capacity, and I/O response guarantee
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
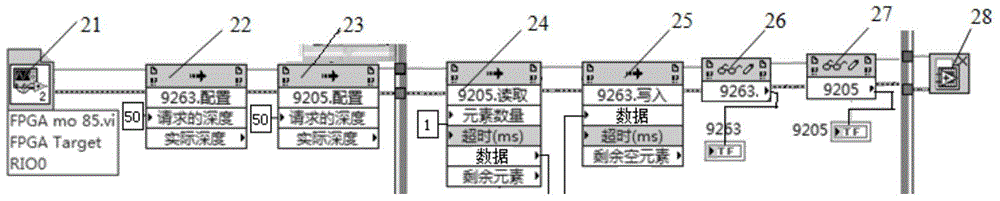
[0040] Such as figure 1 As shown, a macro-micro-hybrid driven parallel mechanism measurement and control system includes a control subsystem, a macro-micro-hybrid driven parallel mechanism and a sensor measurement subsystem, wherein the control subsystem, macro-micro-hybrid driven parallel mechanism and sensors The measurement subsystem is connected in sequence, and the control subsystem is composed of a computer, a real-time control module, an FPGA module, a data acquisition module, and a signal transmission module. The output of the signal transmission module is connected to the input of the macro-micro hybrid drive parallel mechanism.
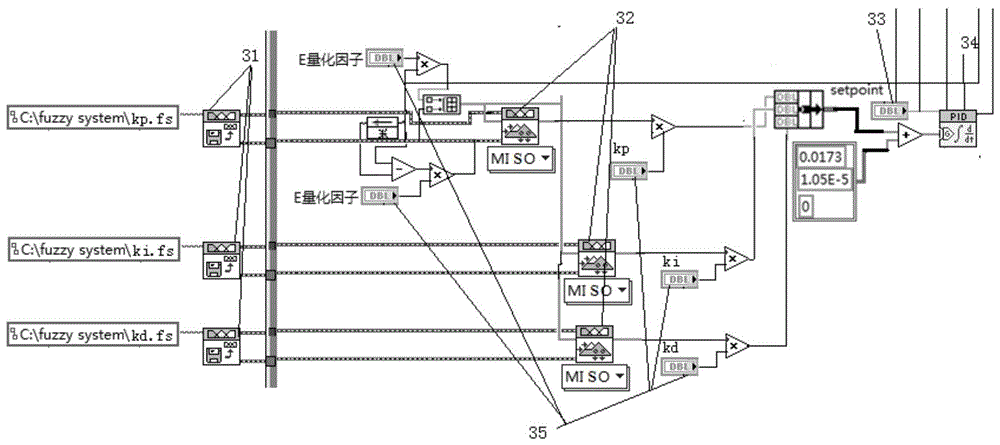
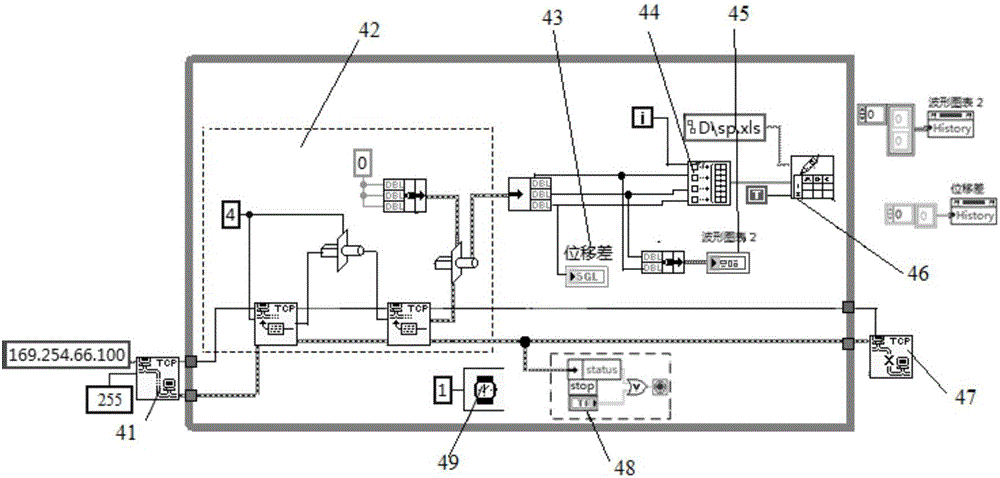
[0041] Wherein, a human-machine interface module is provided on the computer, and the human-machine interface module includes a data acquisition module, a signal transmission module, a control algorithm module, a data display storage module, a kinematics forward solution and an inverse solution module of a macro-micro hybrid drive parallel me...
Embodiment 2
[0060] The structure and method steps of this embodiment are the same as those in Embodiment 1. The macro drive system of each axis is electro-hydraulic servo drive. Features such as light weight and good acceleration. The micro-drive system of each axis is precisely driven by piezoelectric ceramics. Electroceramic has small volume, high resolution and easy control; compared with series mechanism, parallel mechanism has high structural rigidity and load bearing Features such as strong capability, high precision, and compact structure have been more and more widely used. This invention combines the unique advantages of hydraulic servo technology and piezoelectric technology and applies it to parallel mechanisms to achieve large stroke and high-precision control. The macro-micro hybrid drive parallel mechanism, control system, and sensor acquisition system form a complete measurement and control system, which can control the pose of the macro-micro hybrid drive parallel mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More