

A denoising method for airborne lidar point cloud based on 3D grid
An airborne lidar and three-dimensional grid technology, applied in image enhancement, image analysis, instruments, etc., can solve problems such as judgment failure, achieve the effects of increasing diffusion calculations, improving calculation speed, and simplifying construction rules and times
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
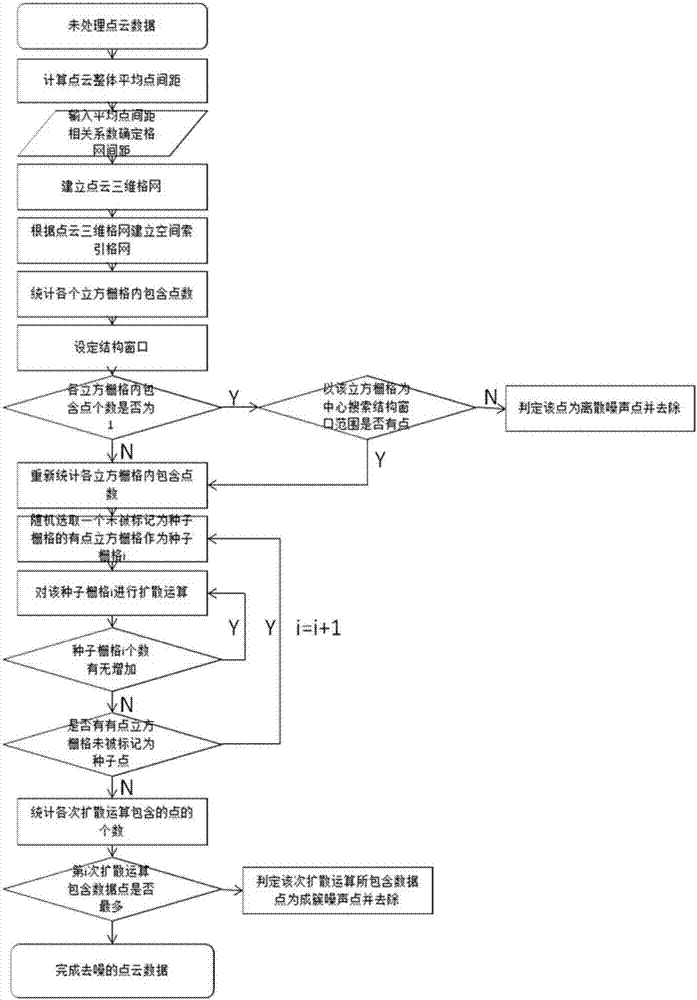
[0046] A three-dimensional grid-based airborne laser radar point cloud denoising method, comprising the following steps:
[0047] A. The present invention has adopted the reference data issued by ISPRS as experimental data, and selected 3 groups of different point cloud data for experimentation;
[0048]B has cut the selected data to meet the experimental requirements. Both sample 1 and sample 2 selected forest point clouds with undulating terrain. meters), the sample 3 selects the point cloud data of villages and towns with flat terrain, the number and density of point cloud points are: 179451 (15.385 per square meter), and each point cloud contains different numbers of discrete noise points and cluster noise point.
[0049] C determines the grid spacing according to the average point spacing of point cloud data points and related parameters;
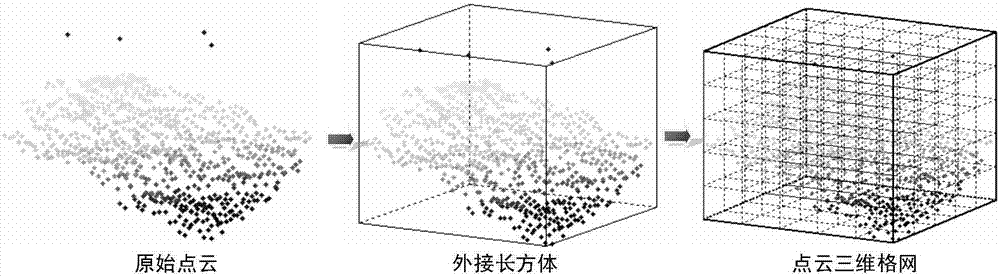
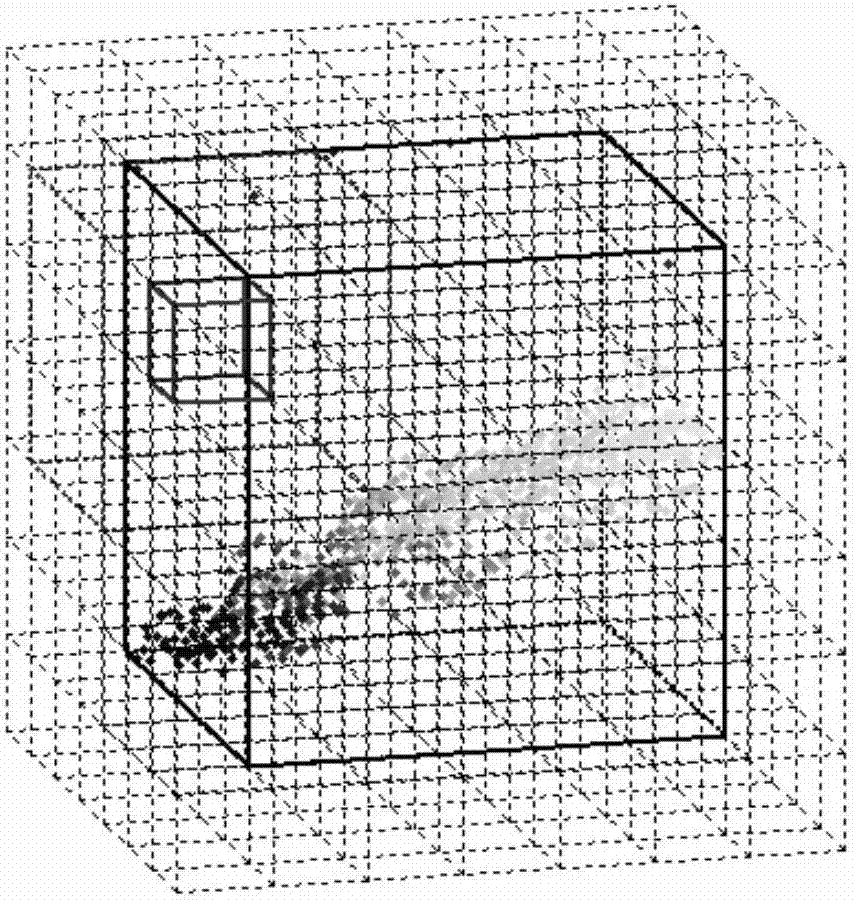
[0050] D segment the x, y, and z directions of the circumscribed cuboid of the point cloud data, and establish a three-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More