

Moving body tracking method and system
A human body and movement technology, applied in the field of moving human body tracking methods and systems, can solve the problems of following people being blocked, high cost, and low cost, so as to ensure continuous tracking, reduce system cost, and solve high cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
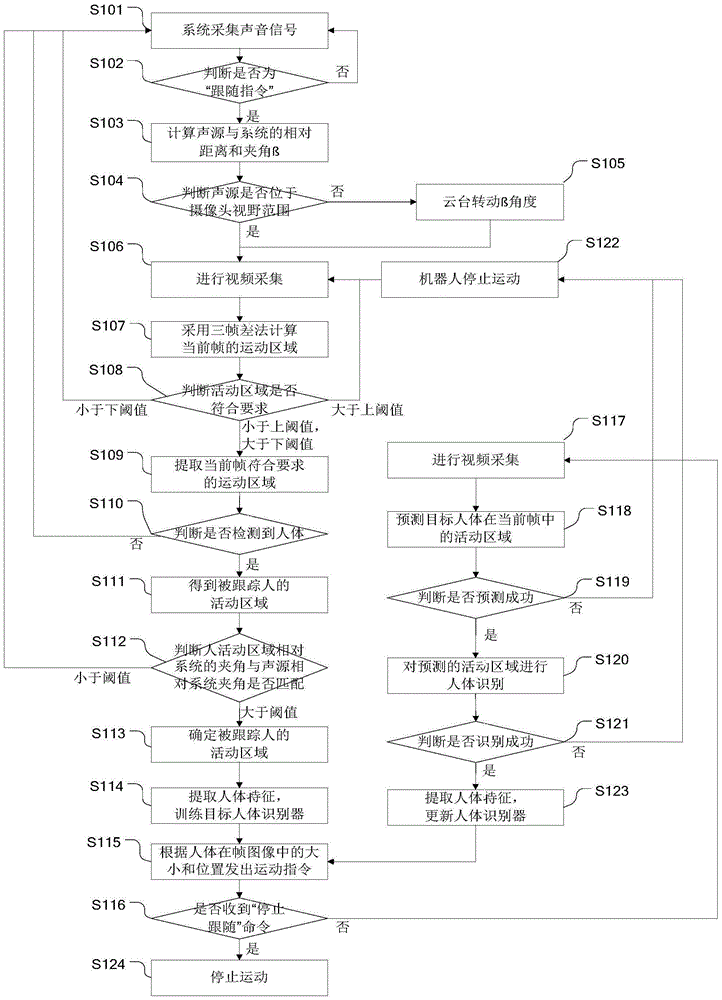
[0072] figure 1 It is a flow chart of the moving body tracking method in Embodiment 1 of the present invention. Such as figure 1 As shown, the process includes the following steps:
[0073] S101: The system collects the sound signal and the time information when the sound arrives at its respective location, and sends it to the central controller.
[0074] The autonomous mobile robot detects the sound signal through the sound sensor;
[0075] 4 sound sensors are evenly distributed around the periphery of the autonomous mobile robot, and 1 sound sensor is located on the top of the gimbal;
[0076] The five array sound sensors are all fixed installations and do not...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More