

Odometer-based GNSS/INS (Global Navigation Satellite System/Inertial Navigation System) vehicle-mounted combined positioning and orientation algorithm for overcoming satellite locking loss
A combined positioning and odometer technology, applied in satellite radio beacon positioning systems, measuring devices, instruments, etc., can solve problems such as divergence and navigation parameter errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
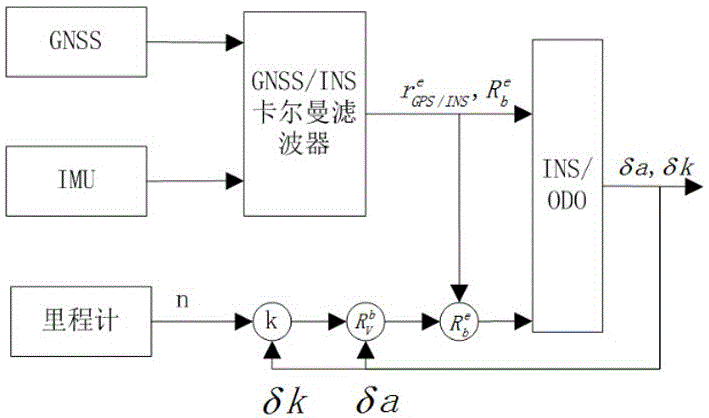
[0056] see Figure 1-Figure 2 , in an embodiment of the present invention, the GNSS / INS vehicle-mounted combined positioning and orientation algorithm based on the odometer to overcome satellite loss of lock, which includes correction of the odometer scale factor error when the GNSS / INS filter converges, the odometer coordinate system and the navigation coordinates The error angle correction is installed between them; when the GNSS satellite data is lost, the odometer corrects each error item in the IMU.
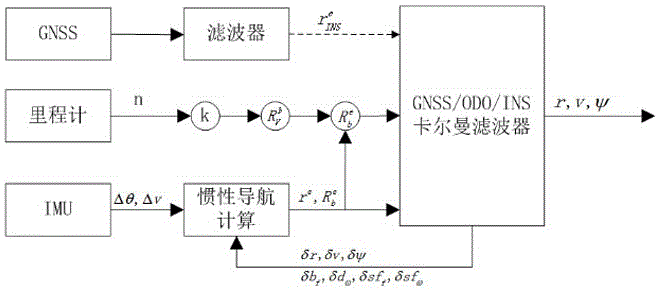
[0057] The specific operation steps are as follows: GNSS / INS and INS / ODO two-stage Kalman filter cascade structure
[0058] The premise of using the formula to correct the scale factor and installation error angle is that the IMU is fully calibrated. At this time, the installation error angle and scale factor have nothing to do with the INS navigation error. Therefore, the filter in this paper adopts a two-stage Kalman filter cascade design, as shown in figure 1 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More