

Functional rehabilitation robot based on flexible cable-driven hand movement
A rehabilitation robot and hand motion technology, applied in passive exercise equipment, manipulators, program-controlled manipulators, etc., can solve the problems of high price, heavy weight, poor wearability, etc., and achieve the effect of reducing weight, compact structure and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071]The following is a detailed description of the cable-driven hand motor function rehabilitation robot of the present invention in combination with the embodiments and the accompanying drawings.
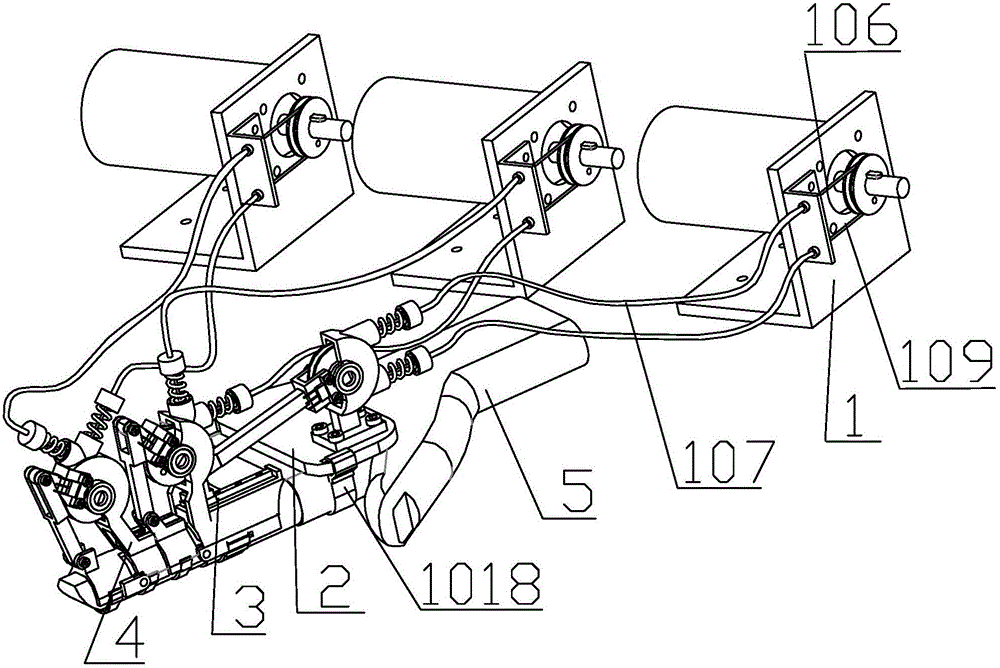
[0072] like figure 1 As shown, the rehabilitation robot of the present invention based on flexible cables driving hand movement function is composed of a drive unit and an execution unit connected to the drive unit. Module 2, the proximal knuckle unit module 3 for driving the joint movement of the middle finger and the far knuckle unit module 4 for driving the joint movement of the finger end. The drive unit 1 includes 3 groups that work independently and have the same structure corresponds to the drive module 1 for driving the metacarpophalangeal joint unit module 2 , the proximal phalanx joint unit module 3 and the far phalanx joint unit module 4 .
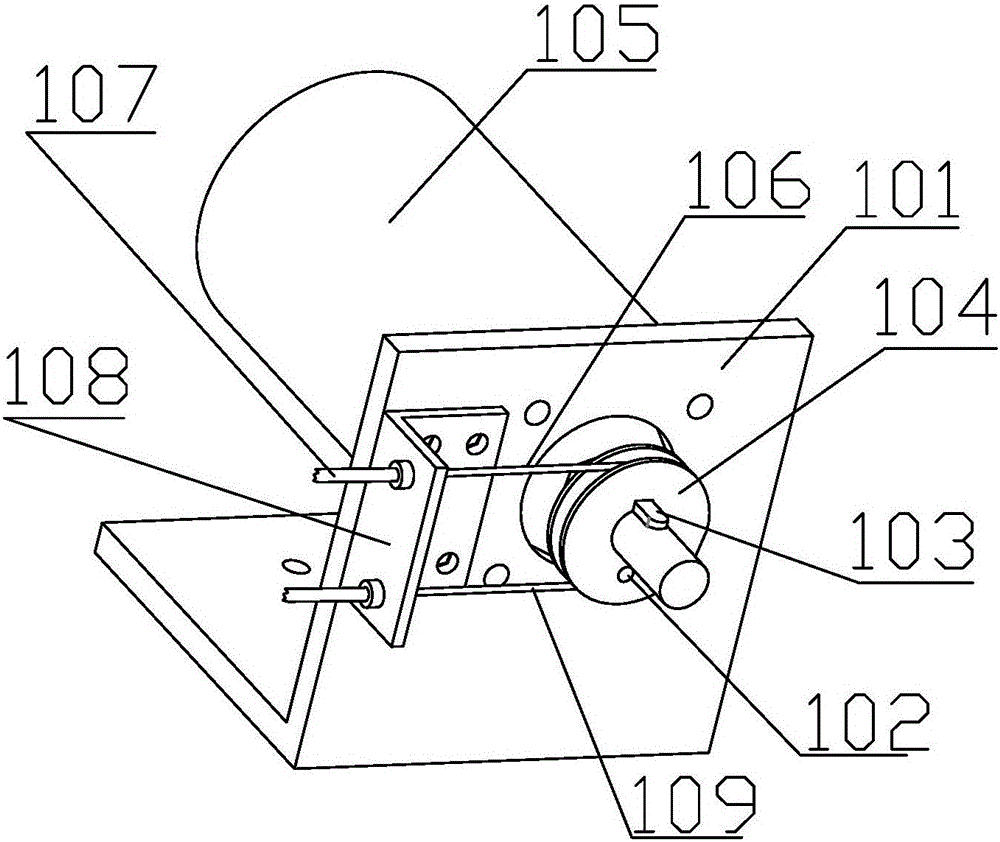
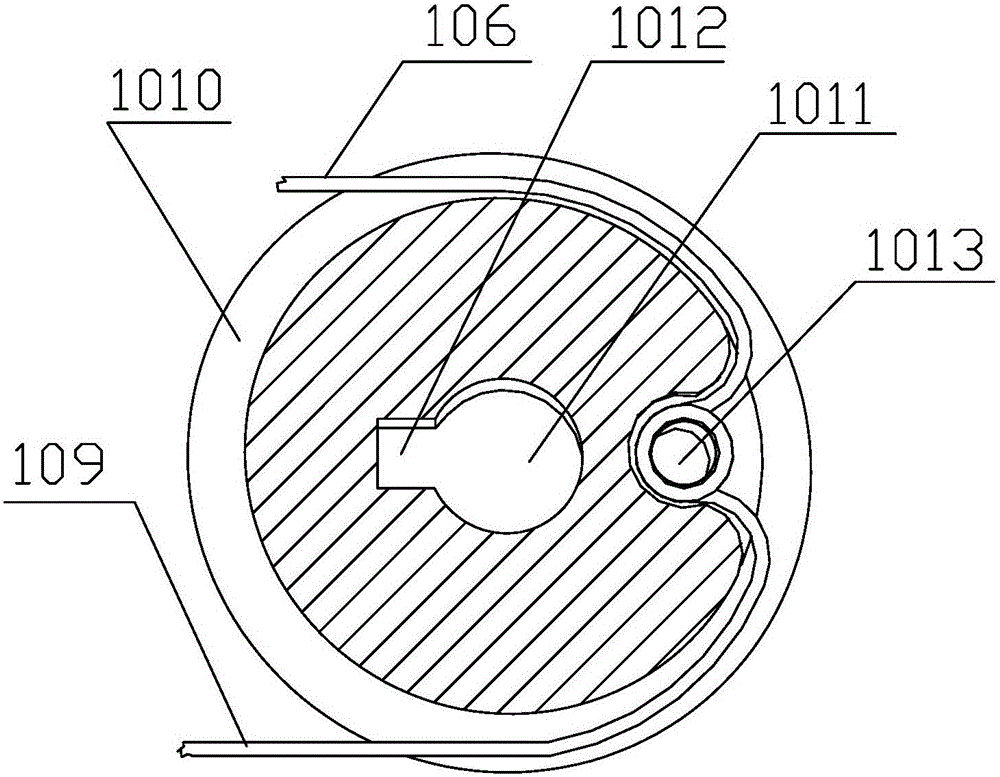
[0073] like figure 2 , image 3 As shown, the drive module 1 includes: a motor 105 with an encoder arranged on the motor base...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More