

Finger side swinging and opposing mechanism of five-finger dextrous hand based on screw linkage mechanism
A technology of lead screw connecting rod and connecting rod mechanism, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of motor performance and power limitation, reliability reduction, inability to maintain position and posture, etc., to achieve high flexibility, operation Smooth, low noise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
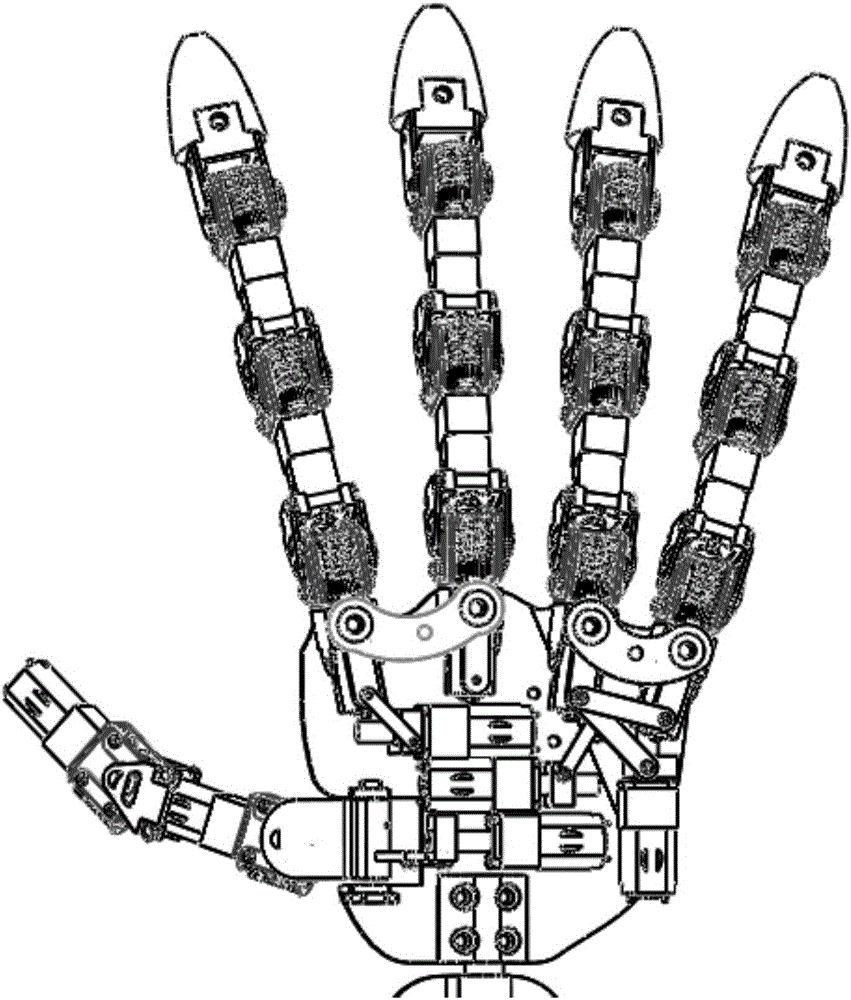
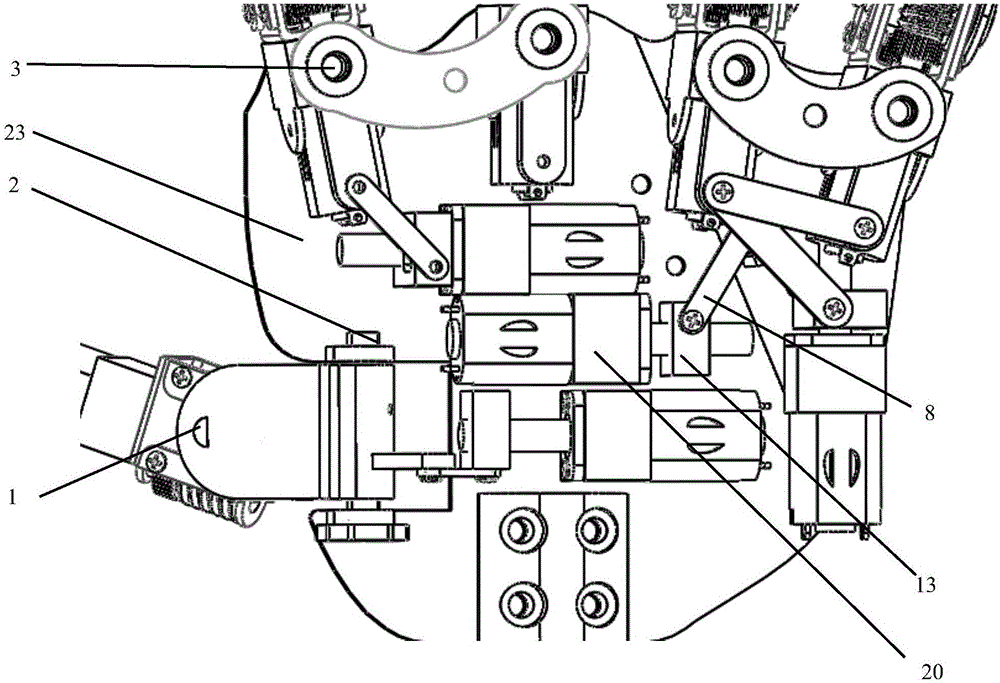
[0020] attached figure 2 A schematic diagram of the palm structure of a five-fingered dexterous hand. Thumb lead screw motor (18) is fixed on the palm main board (23), and links to each other with thumb slide block (11) by lead screw pair. The thumb rotation D axis (2) is combined with the palm main board (23) through the cylinder pair, and the U-shaped fixing groove of the thumb is connected with the thumb rotation D axis (2) by a set screw. The palm motion screw motor (20) is horizontally fixed on the palm main board (23), and the connecting rod three (8) hinged above the palm mechanism slide block (13) promotes the palm small plate (24) around the hinge ( 22) The shaft rotates.
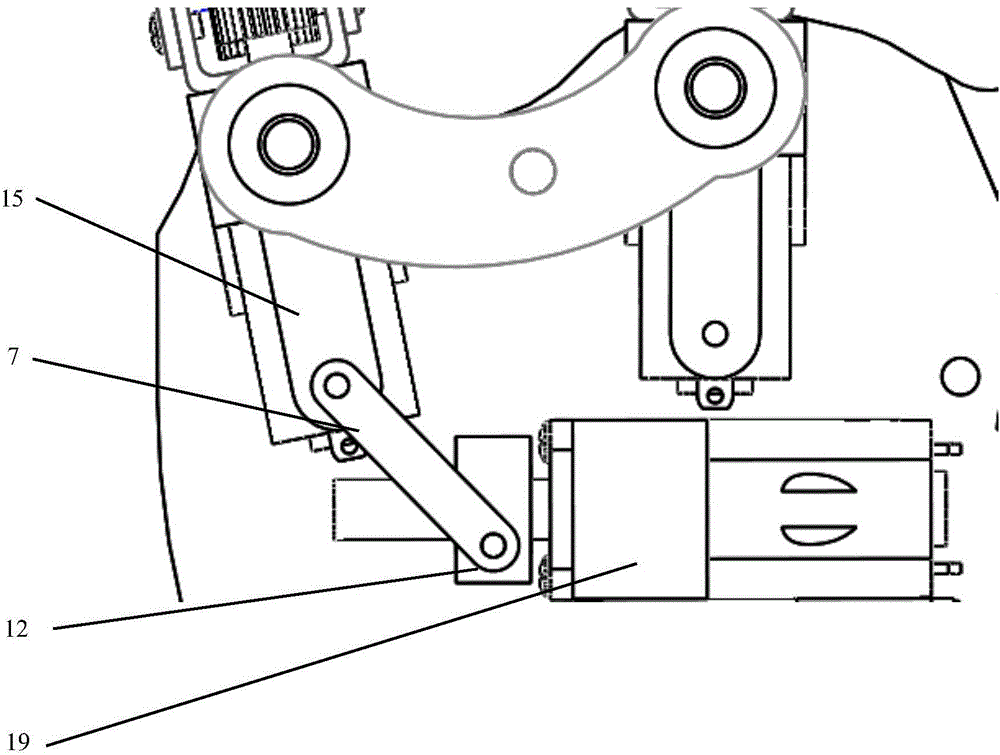
[0021] attached Figure 4 It is a schematic diagram of the linkage side swing mechanism between the ring finger and the little finger. The screw motor (21) that is vertically fixed on the small plate of the palm (24) pushes the ring finger root motor fixture (16) around the ring finger through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More