

A non -ground reference method based on GNSS/MEMS positioning orientation
A triangulation and ground technology, applied in the directions of measuring devices, photogrammetry/video metrology, surveying and navigation, etc., can solve problems such as short battery life of UAVs, large lateral overlap, and susceptibility to airflow , to achieve the effect of increasing the maximum flight area, reducing side overlap and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
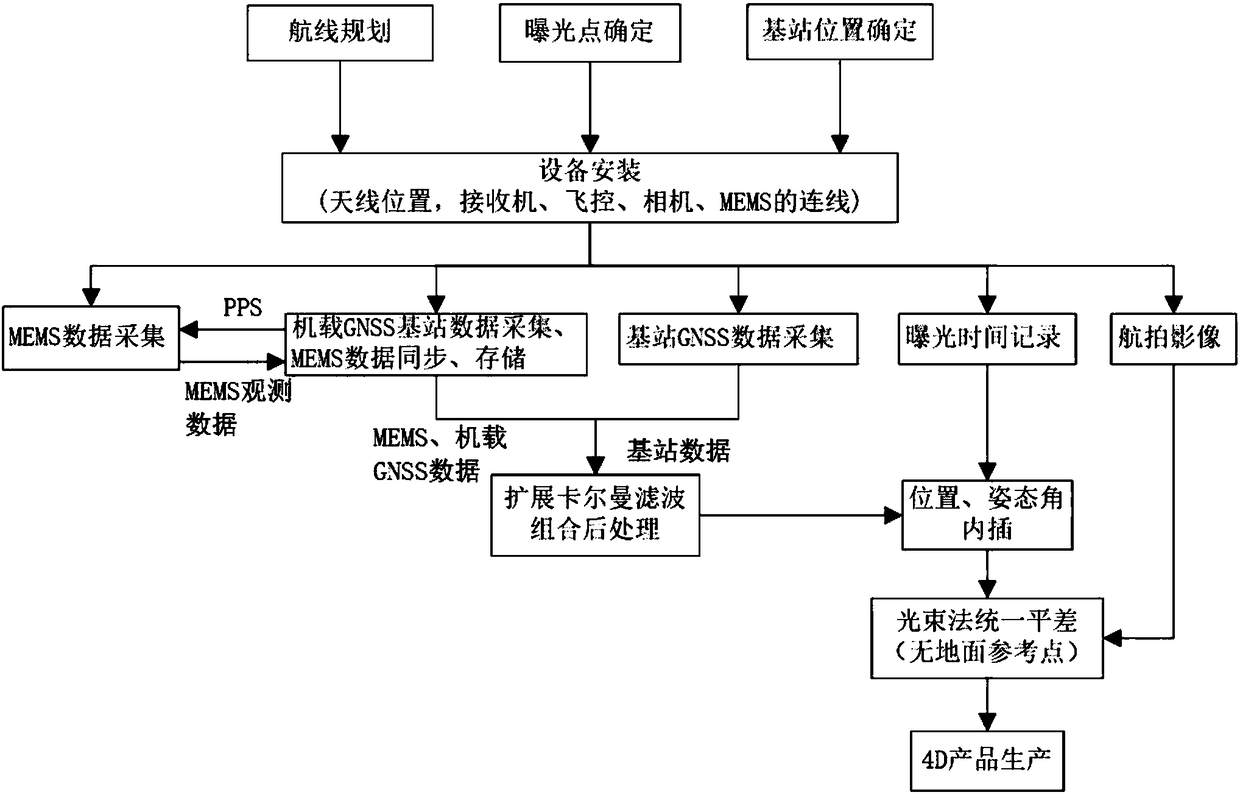
[0030] In the embodiment of the present invention, a low-altitude triangulation method based on GNSS / MEMS positioning and orientation without ground reference, the technical steps adopted include:
[0031] (1) According to the geographical parameters of the area to be surveyed and mapped, including location, shape, area, etc., draw the flight belt, exposure point location, etc. in the ground flight control system, and select the appropriate GNSS base station location.
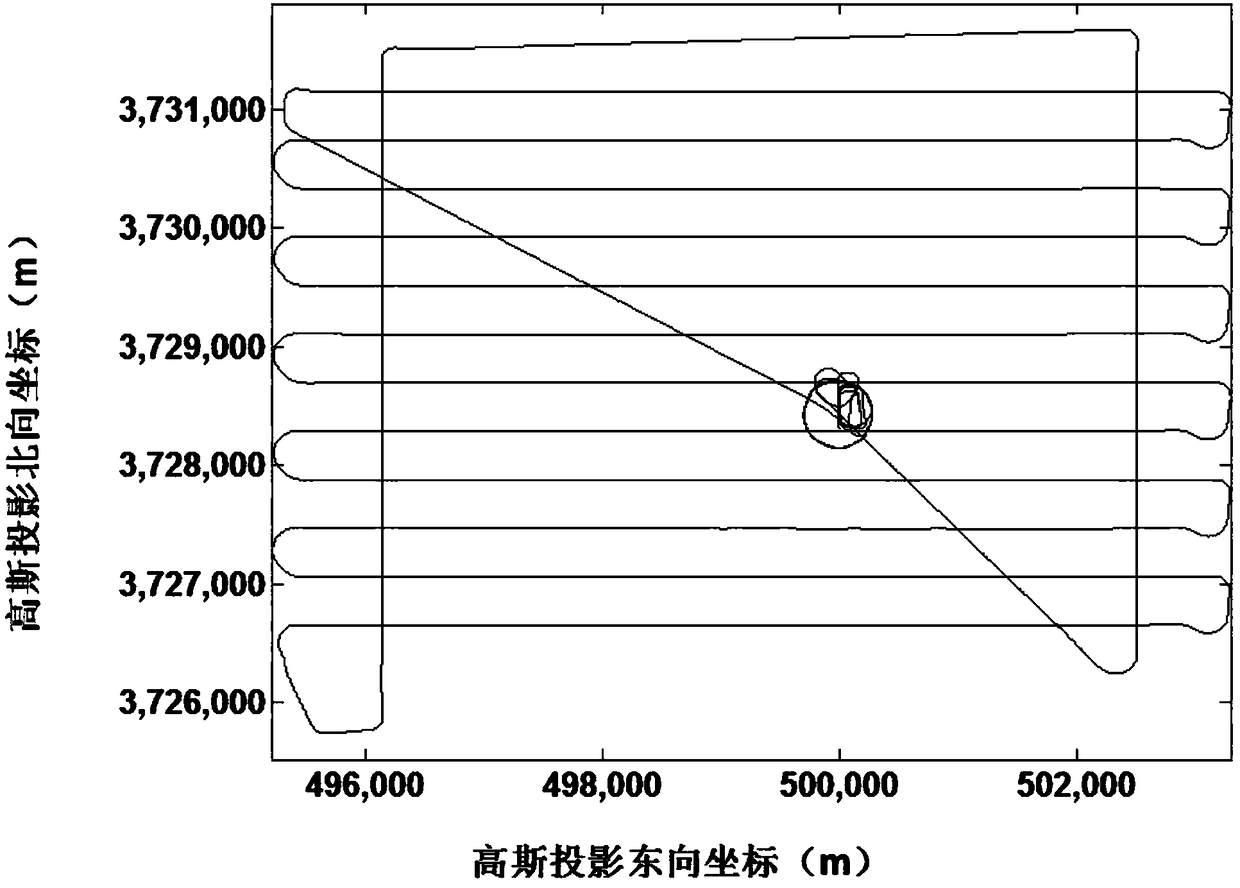
[0032] In order to reduce the layout of image control points in the survey area, it is usually necessary to fly several routes approximately perpendicular to the mapping route, that is, the frame route. Its main function is to play the role of elevation control points at both ends of the basic route, and to correct the coordinate system drift error of the GNSS camera station through the ground control scheme of the four-corner level height control point plus 2 vertical frame routes. On the basis of ensuring acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More