

Double-suction-cup connecting rod type wall face cleaning robot
A cleaning robot, link-type technology, applied in the field of cleaning robots, can solve problems such as inability to complete obstacle-crossing actions, achieve good promotion and use value, and solve the effect of poor obstacle-crossing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] combine figure 1 -8 The present invention is further described in detail.
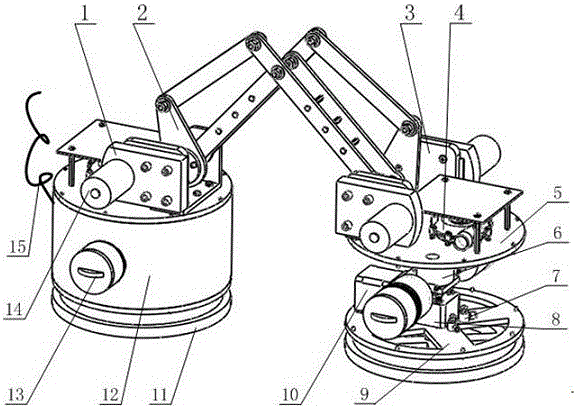
[0025] figure 1 It is an overall structure diagram of a double-suction-cup link-type wall cleaning robot, which consists of two suction cups (11), including an upper end cover (5) and a lower end cover (9), a vacuum pump (4), and a four-link Mechanism (2), 2 stepping motors (10) and stepping motor reducer (8), steering gear bracket (3), 3 steering gears (14) and steering gear reducer (1), cleaning box (13 ), a throttle valve (7), a circular housing (12), an encoder (6) and a safety rope (15).
[0026] figure 2 It is a schematic diagram of the robot’s walking and wiping trajectory. (a) is the overall wiping and walking trajectory of the robot, which clearly shows that when the cleaning robot cleans the wall, it wipes from top to bottom, from left to right, and from right to left. (b) is the local wiping trajectory map of the robot, which walks and wipes in a spiral trajectory. The wiping tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More