

Vehicle obstacle-avoidance path planning research method based on novel manual potential field method
An artificial potential field method and path planning technology, applied in vehicle position/route/altitude control, motor vehicle, two-dimensional position/channel control, etc. Small volume, easy real-time control, improved safety and comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
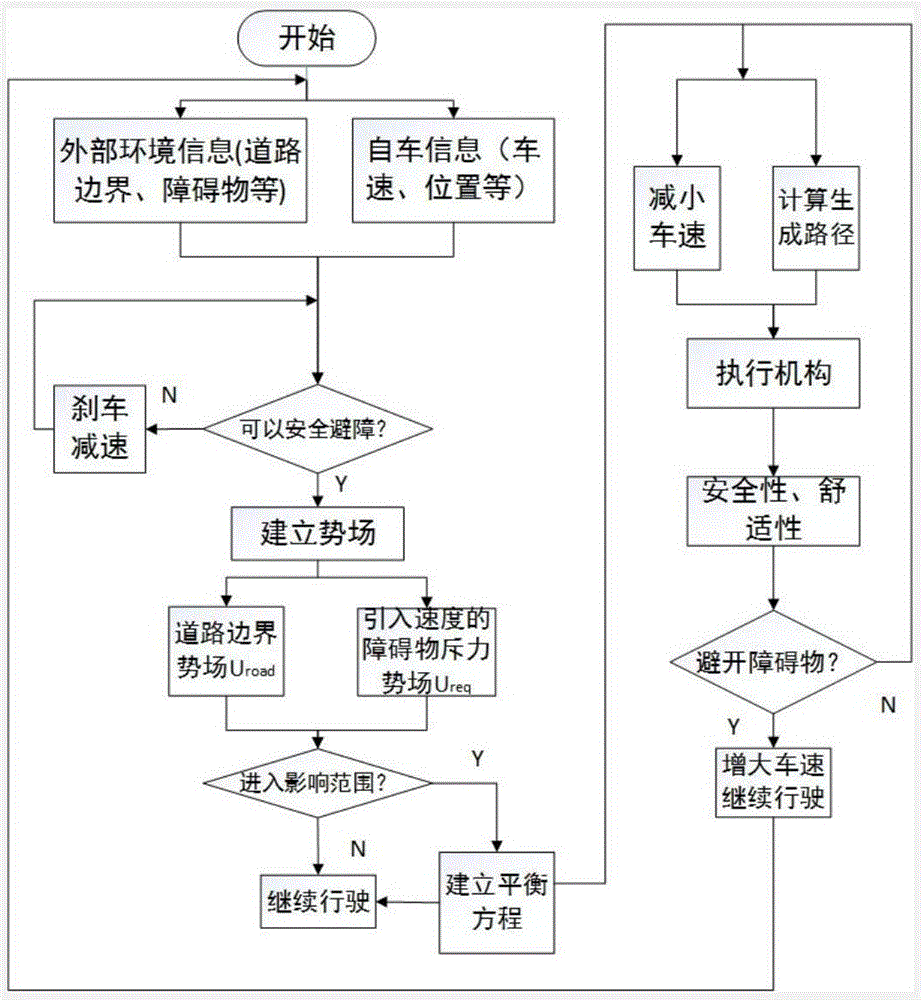
[0035] like figure 1 As shown, a flow chart of a research method for vehicle obstacle avoidance path planning based on the improved artificial potential field method and speed control, including steps:
[0036] S1. Use CCD camera, millimeter-wave radar, and vehicle-mounted equipment (vehicle sensor, global positioning system GPS) to collect in real time the road information, obstacle information, and main vehicle information required for vehicle obstacle avoidance path planning; the CCD camera is installed in front of the main vehicle On the windshield, it is necessary to ensure that the camera can "look straight ahead"; the millimeter-wave radar is installed on the front of the car and on the longitudinal axis of the vehicle, and the distance from the ground is at least ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More