

Image recognition spatial modeling based high building external surface cleaning robot
A cleaning robot and image recognition technology, applied in the field of robots, can solve the problems of poor operation safety, low cleaning efficiency, and low intelligence, and achieve the effect of low cleaning cost, high cleaning efficiency, and high intelligence level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
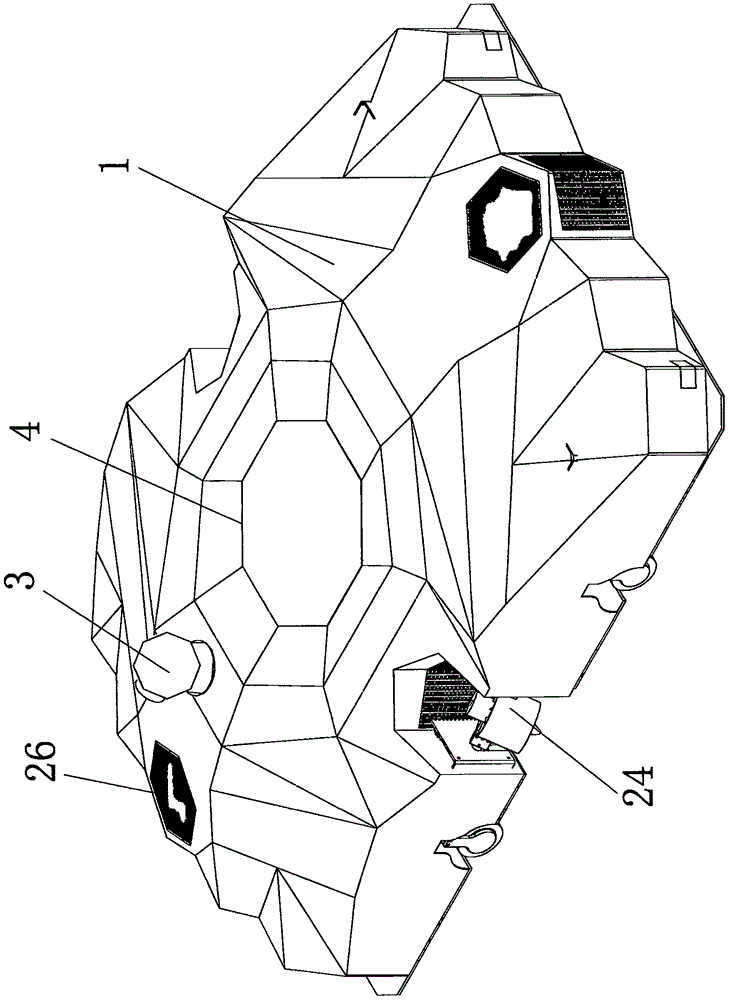
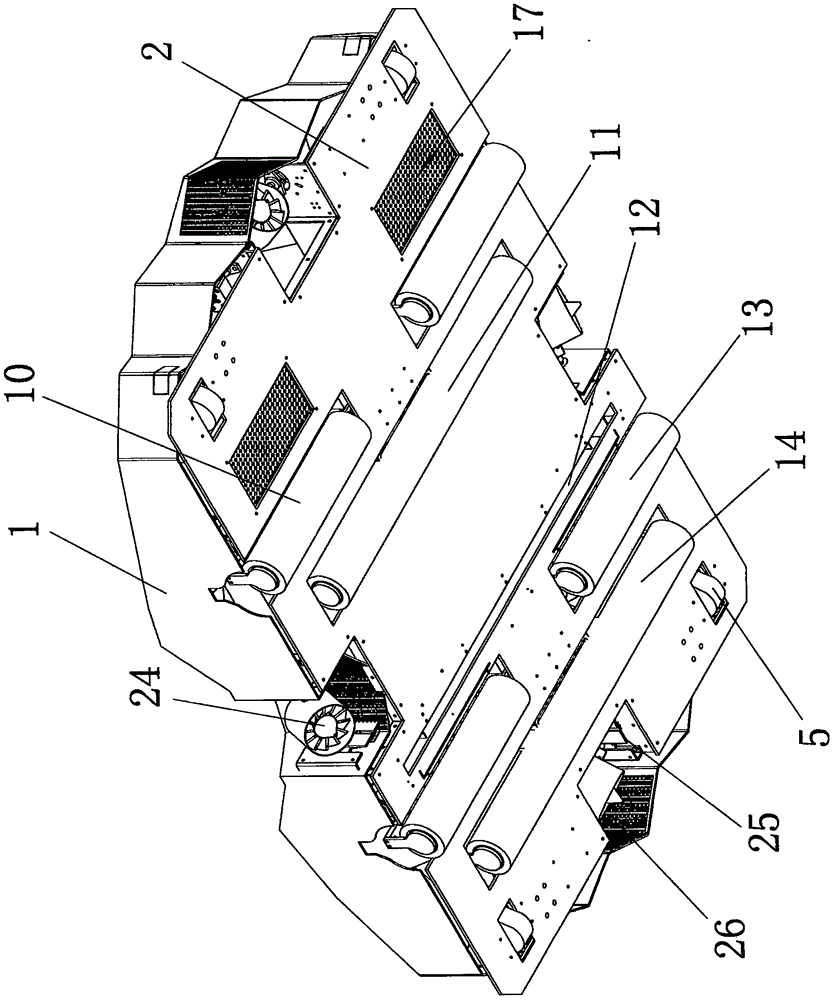
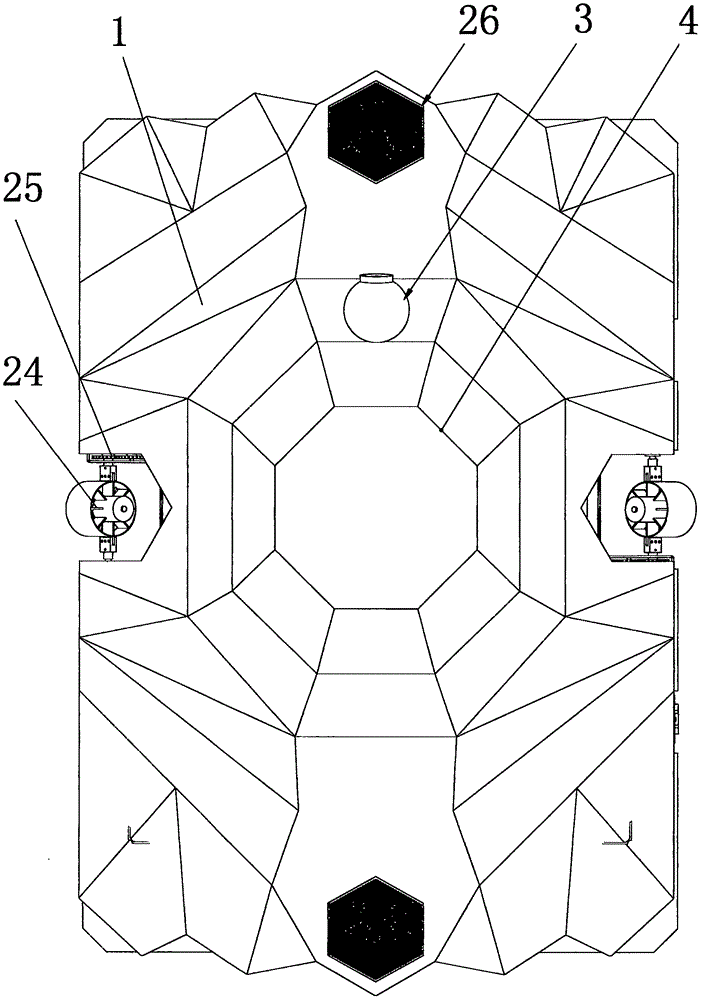
[0025] refer to Figure 1-10 , the specific embodiment adopts the following technical solutions: a high-rise building exterior surface cleaning robot based on image recognition space modeling, including a housing 1, a bottom plate 2, a camera 3, a liquid crystal display 4, support wheels 5, a water spray system 6, and a working pressure Provide and anti-horizontal wind system 7, horizontal extension unit 8, longitudinal push-out mechanism 9 and surface cleaning mechanism, shell 1 and bottom plate 2 form the body of the robot, the surface of shell 1 is installed with camera 3, and shell 1 is provided with liquid crystal display 4. Support wheels 5 are installed on the four corners of the base plate 2, and the base plate 2 is equipped with a water s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More