

Target tracking method based on manifold discriminant non-negative matrix factorization
A technology of non-negative matrix decomposition and target tracking, which is applied in the field of pattern recognition, video surveillance, and computer vision. It can solve the problems of tracking failure, easy loss of targets, and inability to effectively deal with complex scenes, so as to eliminate occlusion and interference from similar backgrounds, Response to lighting changes and target deformation effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
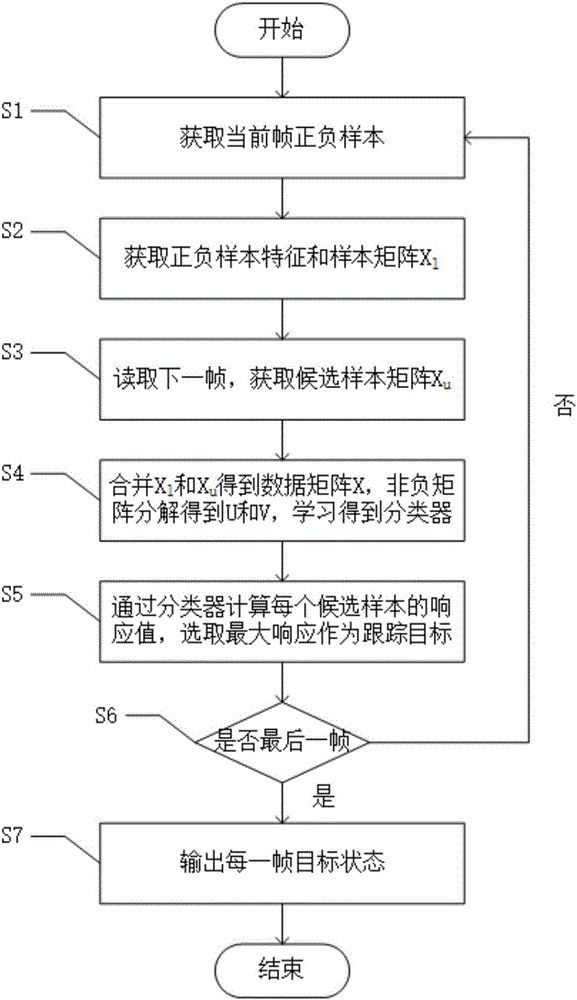
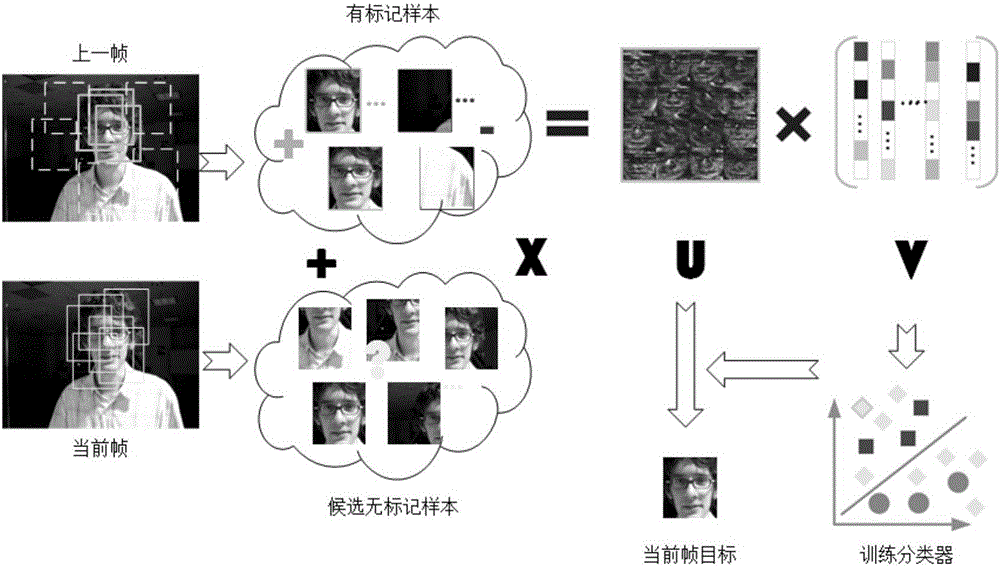
[0036] The target tracking method during the specific implementation of the present invention comprises the following steps:
[0037] Step 1 Obtain positive samples and negative samples;
[0038] Among them, both positive samples and positive samples are obtained near the target position in the previous frame; in this example, 5 positive samples and 200 negative samples are selected;
[0039]At the same time, according to the particle filter framework, each particle is composed of 6 affine parameters, which respectively represent the displacement of the target in the direction x of the vertical axis, the displacement of the horizontal axis y, the rotation angle, the scale change ratio, the aspect ratio and the inclination , through the random change of these six affine parameters, the position parameters of other image regions close to the target position can be obtained; for the above radiation parameters, the displacement in the x direction and the displacement in the y dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More