

Six-freedom-degree self-adaptive wrist joint rehabilitation device
A rehabilitation device and self-adaptive technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of poor comfort, secondary injury of the wrist joint, failure to consider the comfort of human-computer interaction, etc., and achieve low manufacturing cost , Ensure dynamic coincidence, improve kinematic performance and stiffness performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
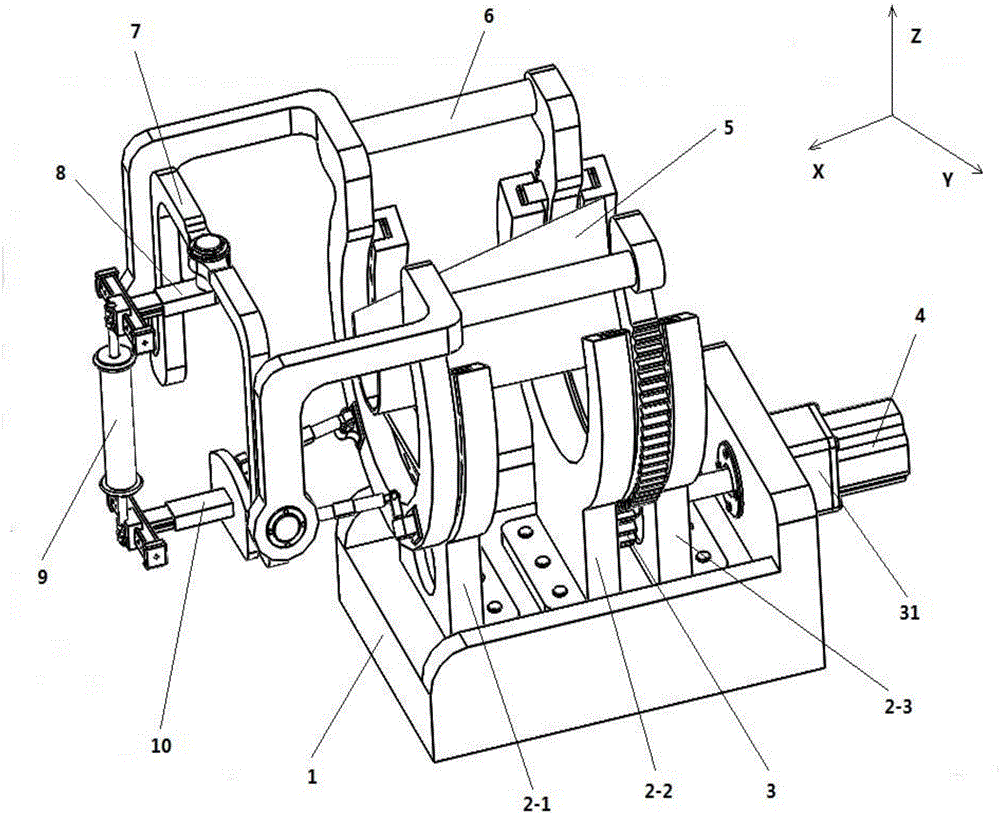
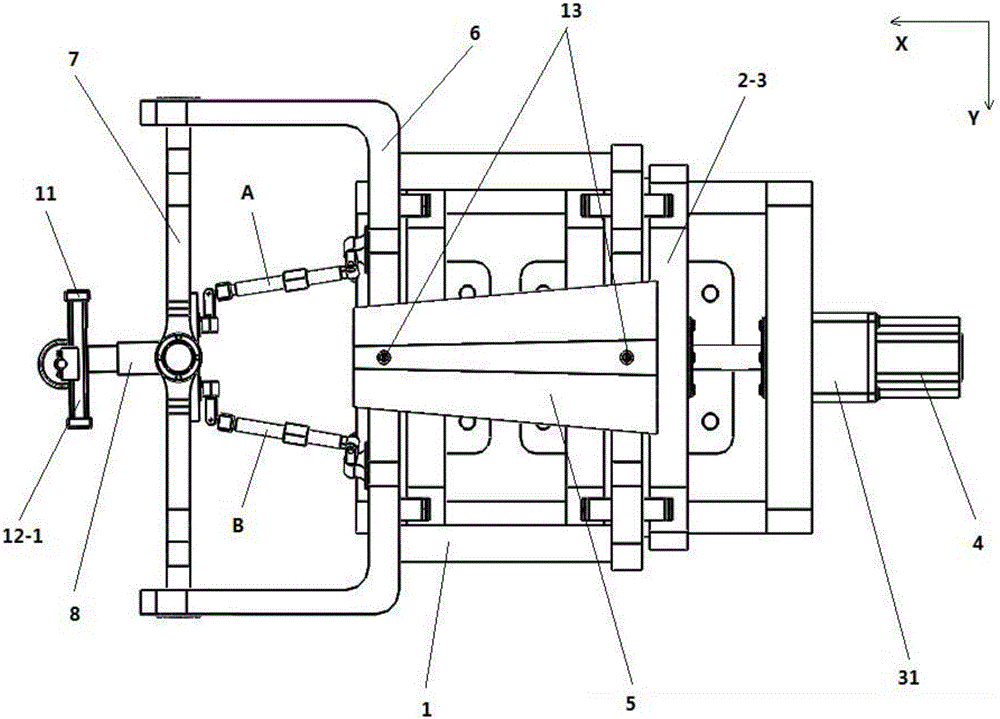
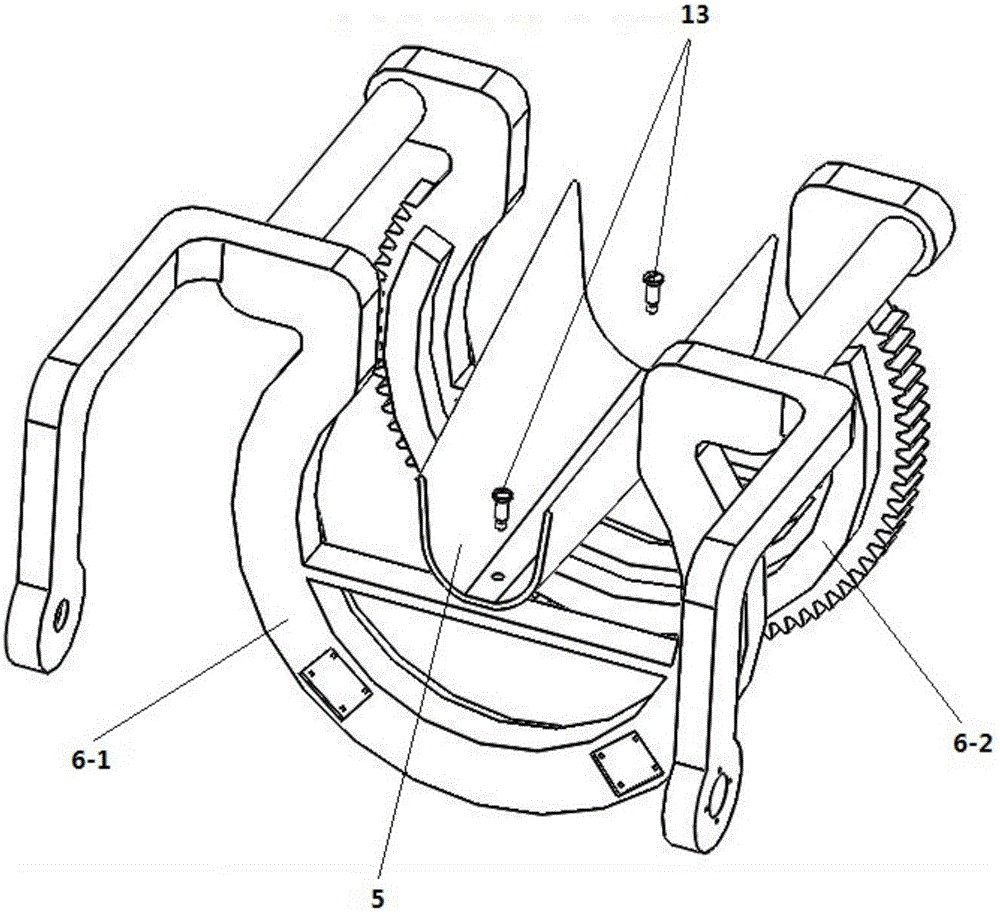
[0031] Such as figure 1 — Figure 12 As shown, the present invention is a six-degree-of-freedom self-adaptive wrist rehabilitation device, which has three active rotation degrees of freedom and three passive movement degrees of freedom, and adopts a series-parallel structure: a series structure, that is, an arm rotation platform (6 ) in series with a revolving pair; parallel structure, that is, the parallel mechanism of two active branched UPSs. The device mainly includes a base (1), an arm rotating table (6), an arc-shaped connecting rod (7), two active branch chains (A, B) and a passive moving structure in X, Y, and Z directions. In the training process, at first the patient's forearm is placed in the arm cuff (5) that is fixedly connected with the arm rotation table (6), the cuff is elastic, and is bound and connected with the patient's forearm by an elastic bandage, and then the patient's palm is also Bind and connect with the cylindrical sponge sleeve (9) through elasti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More